KUKA Research Projects at AUTOMATICA
From 21 - 24 June 2016, KUKA presented three innovative European corporate research projects at the industrial automation and mechatronics trade fair.
Vous utilisez le navigateur Internet Explorer.
Pour bénéficier d’une représentation optimale, veuillez changer votre navigateur.
From 21 - 24 June 2016, KUKA presented three innovative European corporate research projects at the industrial automation and mechatronics trade fair.
In Project AREUS, KUKA and its partners are developingtechnologies for energy-efficient robot-based automation. In one applicationwhich was developed in conjunction with project partner Daimler, two KUKArobots will work on a handling and welding task in an energy-efficient manner.For the first time, the robots are operated using a controller powered by a 600V DC network. This supplies the robots with power without conversion losses.In addition, it is easier to feed the robot’s brake energy back into the DC network,store it temporarily or even use it immediately to speed up another robot.
In a second application, a new form of energy-efficient path planning will bepresented in conjunction with project partner TU Chalmers. The application can achieve savings of up to 30% in energy consumption and up to 60% with regard to peak demand for energy supply, depending on the type of task. This will be demonstrated to visitors by a KUKA robot executing a path firstly with conventional planning and then using the energy-optimized method. The energyconsumption measurements will be displayed in real time.

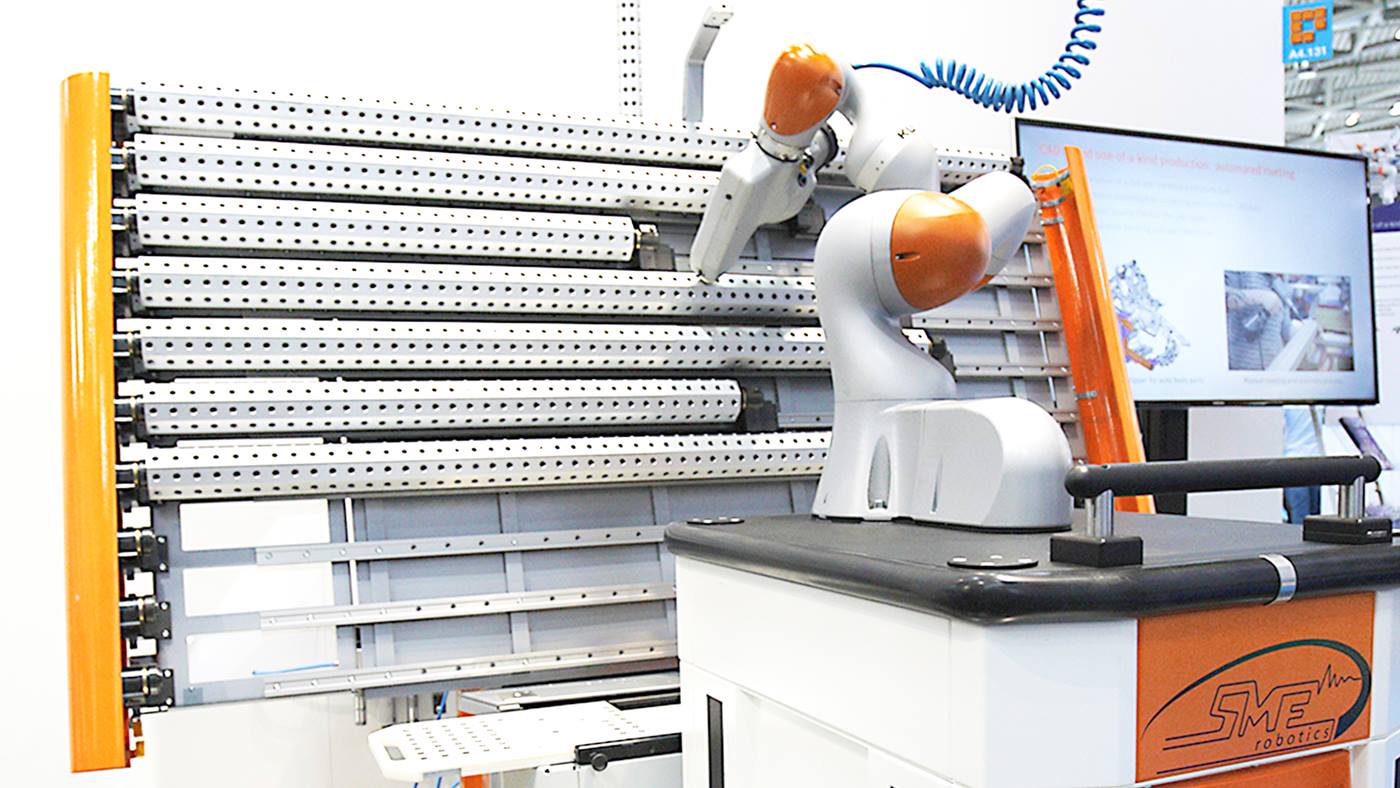
In the SMErobotics Project, KUKA is working alongside Europeanpartners to improve the competitiveness of small and medium-sized companies. In this regard, one application will demonstrate the automated placement of rivets for the production of grippers that can be manufactured in batch size 1 at various locations. This process makes use of innovative, virtual models for simulating, planning and monitoring task execution and a new type of graphical user interface for programming and operation.
Another exhibit will demonstrate the twin-arm assembly of metallic structures using twolightweight LBR iiwa robots. A human operator can easily demonstrate the assembly processbeforehand. The process is then planned automatically and converted into a skillsbasedrobot program. Skills describe robotic capabilities and expert knowledge – a basicrequirement for dealing with production which has many variants.
In the RobDREAM Project, technologies are being developed to help robots improve their capabilities essentially “in their sleep”. Periods in which the robot is not active, typically at night, can be used for complex optimization calculations in simulations which enable the robot to work more efficiently the following working day.
The project team will make use of an LBR iiwa lightweight robot to demonstrate the firststeps on the path towards this goal. The LBR iiwa will use a 3D camera to detect and pickup colorful Lego bricks. The robot will only be presented with a required set of Legobricks. That is all the robot needs to learn the composition. As soon as an empty box is placed in the workspace, the robot fills it with the relevant Lego bricks. During the workingday, the robot figures out where the Lego bricks are kept, where obstacles are and where the empty boxes are typically placed. In the end, the robot reaches an optimum speed of execution as a result of experimentation with different path planning algorithms and sets of parameters.

With these three projects, we are implementing our ideas in collaboration with research partners from all over Europe. The results will be incorporated in new products and solutions and this could help to open up new markets.

