認識、構造化、把握:Bin Pickingのしくみ
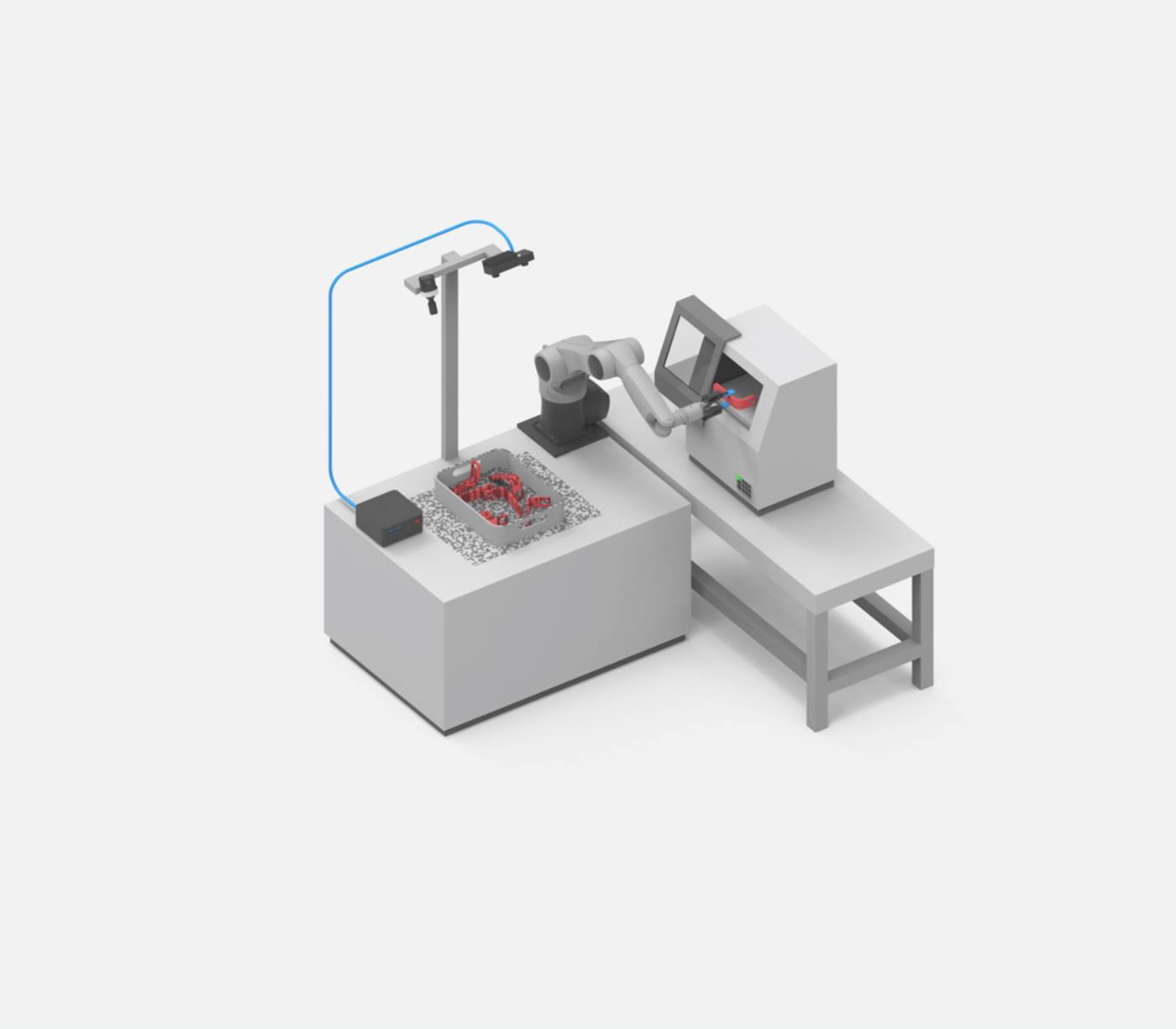
容器にぶつかることなくから確実に部品を取り出すということが、ボックスKUKA.SmartBinPickingの技術パッケージにより 、自動的に実行できるようになりました。このソフトウェアとRoboceptionの視覚認識を組み合わせることで、例えば6軸ロボット KR AGILUSや、 KR CYBERTECH 、KR IONTECなどによってボックスからの部品の 衝突と特異性のない把持を可能にします。
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください

KUKA.SmartBinPickingソフトウェアは、AIベースの物体認識とロボットの正確な経路計画の完璧なコンビネーションを提供します。ハンドル1つで、ボックスから高速でぶつかることなく部品を取り出せます。
容器にぶつかることなくから確実に部品を取り出すということが、ボックスKUKA.SmartBinPickingの技術パッケージにより 、自動的に実行できるようになりました。このソフトウェアとRoboceptionの視覚認識を組み合わせることで、例えば6軸ロボット KR AGILUSや、 KR CYBERTECH 、KR IONTECなどによってボックスからの部品の 衝突と特異性のない把持を可能にします。
AIによる部品認識と精密かつ平行な経路計画の組み合わせにより、工業生産における自動化ソリューションをインテグレーターまたはエンドユーザーに提供します。