บริษัท Sedus Stoll AG ได้ทำการผลิตเฟอร์นิเจอร์สำนักงานมูลค่าสูงตั้งแต่ปี 1871 บริษัทเป็นที่รู้จักในเรื่องเก้าอี้หมุนตัวแรกของโลกที่มีระบบกันสะเทือนแบบเสาหมุน ซึ่งเรียกว่า "การหมุนแบบสปริง" เพื่อขับเคลื่อนการผลิตแบบอัตโนมัติ บริษัท Trafö Förderanlagen GmbH & Co. KG ได้ทำการออกแบบระบบ Pick-and-Place ด้วยซอฟต์แวร์ที่กำหนดเอง หุ่นยนต์ KUKA KR QUANTEC รุ่น KR270 R2700 ultra ทำหน้าที่เป็นตัวเชื่อมโยง: มันจะทำการโหลดท่อเลเซอร์ซึ่งถูกประกอบแบบแมนนวลมาจนถึงปัจจุบัน โดยอัตโนมัติอย่างสมบูรณ์ด้วยวัสดุจากคลังสินค้า ในระหว่างการดำเนินการ Trafö สามารถดึงประสบการณ์มานานหลายปีในฐานะผู้ให้บริการระบบจัดเก็บอัตโนมัติและโซลูชั่นโลจิสติกส์
การโหลดแบบอัตโนมัติของท่อเลเซอร์เหมาะสมอย่างยิ่งกับเงื่อนไข
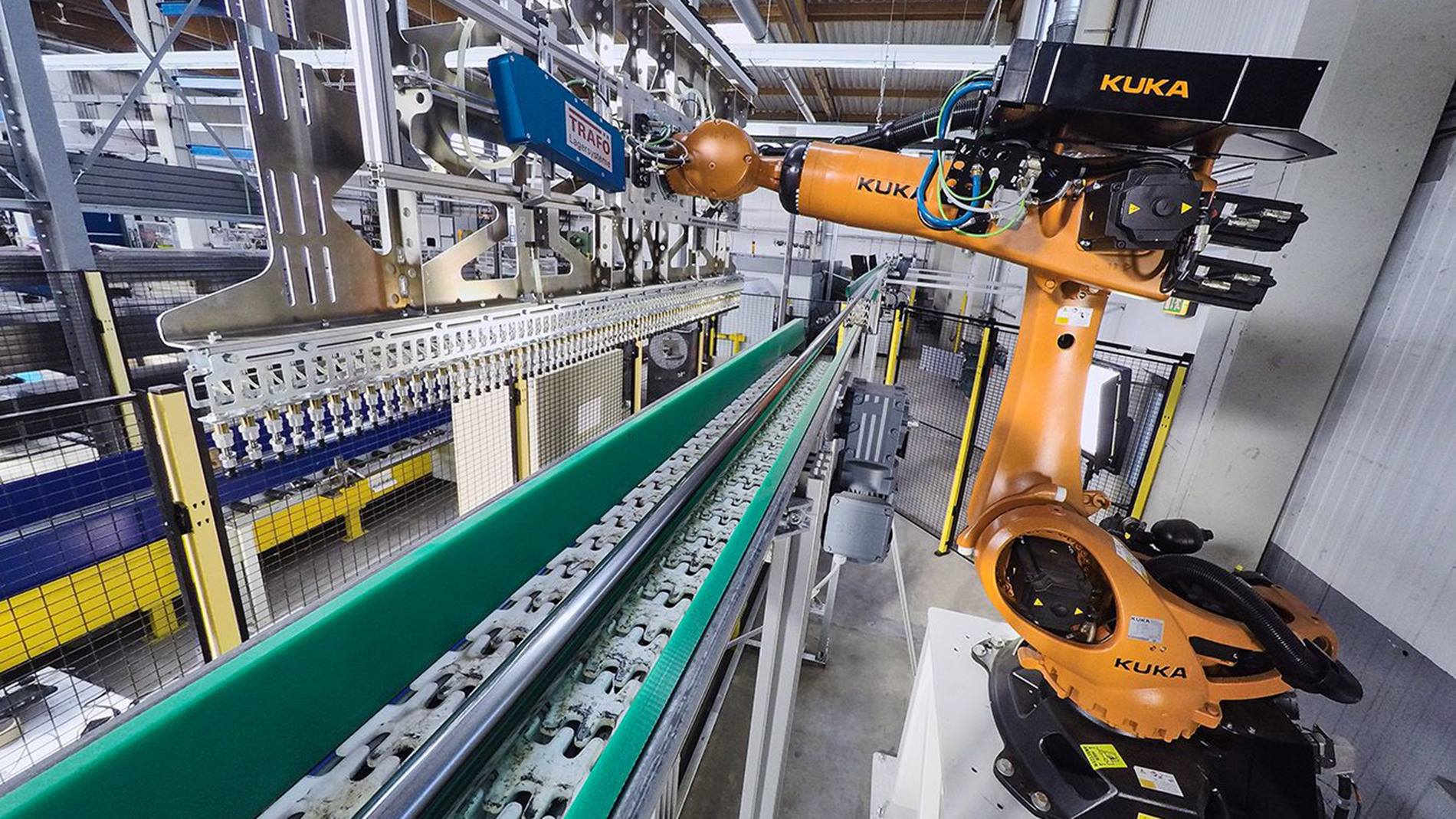
Ulrich Neckermann ผู้จัดการฝ่ายขายของ DACH ที่ Trafö กล่าวว่า “สิ่งพิเศษเกี่ยวกับหุ่นยนต์ Pick-and-Place คือการติดตั้งเลเซอร์แต่ละท่อ” "ไม่จำเป็นต้องโหลดด้วยตนเองอีกต่อไป" Trafö ได้พัฒนาซอฟต์แวร์พิเศษสำหรับระบบ ซึ่งทำให้องค์ประกอบที่เกี่ยวข้องทั้งหมดสามารถสื่อสารกันได้ แผนการผลิตแบบดิจิทัลจะระบุว่า เลเซอร์ควรถูกโหลดแบบอัตโนมัติอย่างสมบูรณ์เข้ากับท่อประเภทไหน วัสดุจะได้รับคำสั่งจากคลังสินค้าผ่านแท็บเล็ต ระบบจัดเก็บจะส่งท่อที่ถูกสั่งผ่านสายพานลำเลียงในระบบคาสเซ็ทไปยังเซลล์หุ่นยนต์ โดยจะเคลื่อนที่จากคลังมายังหุ่นยนต์และจากหุ่นยนต์ไปยังเลเซอร์ ในคาสเซ็ทแบบเปิดหลังคามักจะมีการเก็บท่อชนิดต่าง ๆ ไว้ เพื่อที่จะทำให้เกิดการรับรู้วัตถุ หุ่นยนต์จึงถูกติดตั้งด้วยระบบการรับรู้แบบ 3D
หุ่นยนต์ Pick-and-Place ที่มีการจดจำวัตถุในตัว
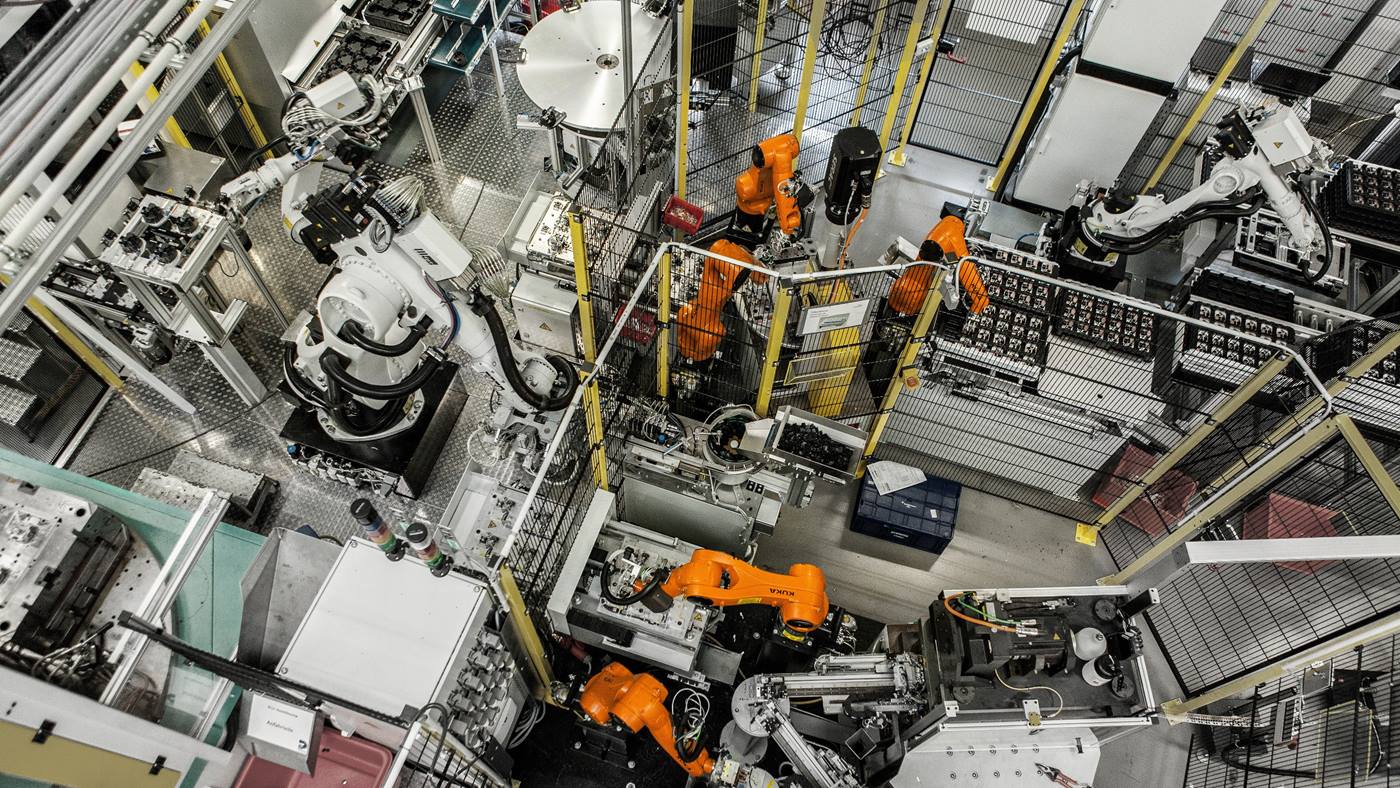
แผนการผลิตจะระบุว่า จะทำการแก้ไขท่อใดในท่อเลเซอร์ ด้วยข้อมูล หุ่นยนต์จะทำการสแกนเนื้อหาของระบบคาสเซ็ทด้วยการช่วยเหลือของสแกนเนอร์แบบ 3D ดังนั้นท่อที่ร้องขอจะถูกระบุโดยการรับรู้วัตถุ หุ่นยนต์ถูกติดตั้งด้วยกริปเปอร์สุญญากาศ อันหนึ่งสำหรับท่อกลมและอีกอันสำหรับท่อเหลี่ยม มันจะทำการเลือกเครื่องมือที่เหมาะสมและหยิบท่อที่เกี่ยวข้องออกจากคาสเซ็ท มันปรับมุมเอียงของกริปเปอร์เข้ากับตำแหน่งของท่อ หากการบันทึกไม่ประสบความสำเร็จในทันที การติดตามจะเกิดขึ้น สิ่งนี้รับประกันกระบวนการที่เชื่อถือได้ แม้ว่าท่อจะถูกวางขวางหรือเอียง หุ่นยนต์จะจับท่อยกขึ้นและวางลงบนสายพานลำเลียงซึ่งนำไปสู่อุปกรณ์ที่รับเลเซอร์
 การรับรู้วัตถุผ่านสแกนเนอร์ 3D ทำให้เกิดการหยิบท่อที่เชื่อถือได้ (c) บริษัท Fotoatelier Bernhard e.K.
การรับรู้วัตถุผ่านสแกนเนอร์ 3D ทำให้เกิดการหยิบท่อที่เชื่อถือได้ (c) บริษัท Fotoatelier Bernhard e.K.
การโหลดแบบอัตโนมัติโดยสมบูรณ์ช่วยเพิ่มการทำกำไรของระบบการผลิต
ด้วยการโหลดแบบอัตโนมัติของท่อเลเซอร์ ทำให้กำไรการผลิตสูงขึ้นอย่างเห็นได้ชัด อย่างแรกคือช่วยลดการแทรกแซงแบบแมนนวลในการโหลด อย่างต่อไปคือทำให้เกิดประโยชน์สูงสุดในการใช้เลเซอร์ด้วยการป้อนวัสดุอัตโนมัติที่แม่นยำ ด้วยหุ่นยนต์ Pick-and-Place สามารถทำการประกอบระบบเลเซอร์หลายชั้นได้ในช่วงเวลาน้อยกว่าหนึ่งนาที ข้อดีจะเห็นได้ชัดขึ้นเป็นพิเศษ เมื่อมีการเปลี่ยนวัสดุบ่อยครั้งในการผลิตประจำวัน