Du använder en äldre version av webbläsaren Internet Explorer. För en så bra upplevelse som möjligt bör du uppdatera din webbläsare.
Pick-and-place-system: KUKA-robot placerar rör i rätt spår
Trafö Förderanlagen GmbH & Co. KG har utvecklat en pick-and-place-robot åt Sedus Stoll AG för att höja automationsgraden i företagets kontorsmöbeltillverkning: En KR QUANTEC-robot betjänar företagets rörlaser helt automatiserat. Produktionsanläggningens effektivitet har ökats dramatiskt.
Sedan 1871 tillverkar Sedus Stoll AG högkvalitativa kontorsmöbler. Företaget är känt för att ha utvecklat världens första vridbara stol med vridbar fjädring, den så kallade ”Federdreh”. Företaget ville ta sin automation till en ny nivå och anlitadeTrafö Förderanlagen GmbH & Co. KGsom utvecklade ett pick-and-place-system med skräddarsydd programvara. En viktig länk i automationslösningen: en KUKA-robot av typen KR270 R2700 ultra från serien KR QUANTEC: Roboten betjänar rörlasern helt automatiserat och hämtar material från ett lager. Rörlasern betjänades tidigare av företagets personal. Trafö drog nytta av sin långa erfarenhet som leverantör av helt automatiserade lagersystem och logistiklösningar när de skulle utveckla detta projekt.
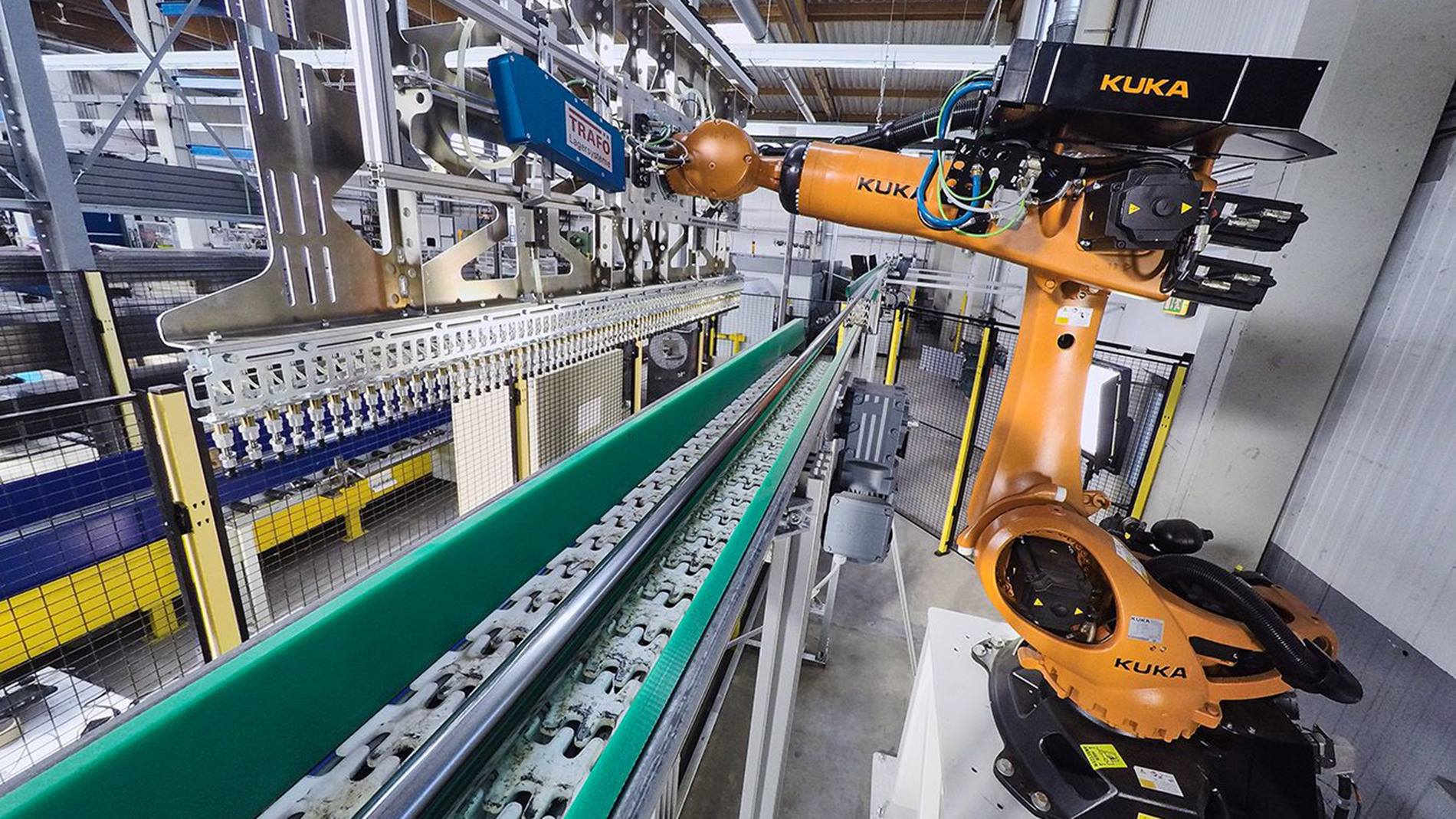
KUKA:s robot KR QUANTEC betjänar rörlasern helt automatiserat. (c) Fotostudio Bernhard e.K.
Den automatiserade betjäningen av rörlasern har anpassats optimalt till de givna förhållandena
”Det som utmärker den här pick-and-place-roboten är hur den betjänar lasern med enstaka rör”, berättar Ulrich Neckermann, försäljningschef för DACH hos Trafö. ”Den manuella betjäningen bortfaller helt.” Trafö har utvecklat en speciell programvara till anläggningen. Alla anläggningsdelar kan nu kommunicera med varandra. Digitala produktionsscheman anger vilka rörtyper den helautomatiserade robotbetjäningen ska tillföra lasern. Materialet beställs fram från långgodslagret från en surfplatta. Lagersystemet levererar de beställda rören via en transportör som löper från lagret till roboten och från roboten till lasern, i systemkassetter till robotcellen. I kassetterna, som är öppna upptill, förvaras i första hand olika rörtyper. För att kunna identifiera olika objekt är roboten utrustad med ett 3D-igenkänningssystem.
Pick-and-place-robot med inbyggd objektigenkänning
Produktionsschemat anger vilket rör rörlasern ska bearbeta i nästa steg. Innehållet i systemkassetten skannas med robotens inbyggda 3D-skanner. Det beställda röret identifieras med hjälp av objektigenkänning. Roboten är utrustad med två vakuumgripdon – ett för runda rör och ett för rektangulära. Roboten väljer ett passande verktyg och plockar upp det aktuella röret från kassetten. Roboten anpassar gripdonets lutningsvinkel till rörets position. Om roboten skulle misslyckas med upplockningen gör den ett nytt försök. Detta säkerställer en tillförlitlig process även när rören ligger diagonalt eller har hamnat snett. Roboten suger fast röret, lyfter upp det och lägger ned det på ett transportband där det transporteras vidare till laserns upptagningsanordning.
Objektigenkänning med 3D-skanner säkerställer tillförlitlig upplockning av rören. (c) Fotostudio Bernhard e.K.
Trafö: Innovativt rörplockningssystem för laserlastare
Helautomatiserad betjäning gör produktionsanläggning mer lönsam
Den automatiserade betjäningen av rörlasern har lett till tydliga effektivitetsvinster i produktionen. Dels bortfaller manuella arbetsmoment vid materialbetjäningen. Dels har den exakta, automatiska materialtillförseln bidragit till att laserns utnyttjandegrad har höjts till ett maximum. Med pick-and-place-roboten kan laseranläggningen nu förses med nytt material på under en minut och det i flerskiftsdrift. Fördelarna märks framför allt vid frekventa materialbyten under produktionen.
Robotcellen har minskat mängden tungt arbete och ökat på produktionstakten. Laseranläggningen kan nu köras i flerskiftsdrift utan bemanning.