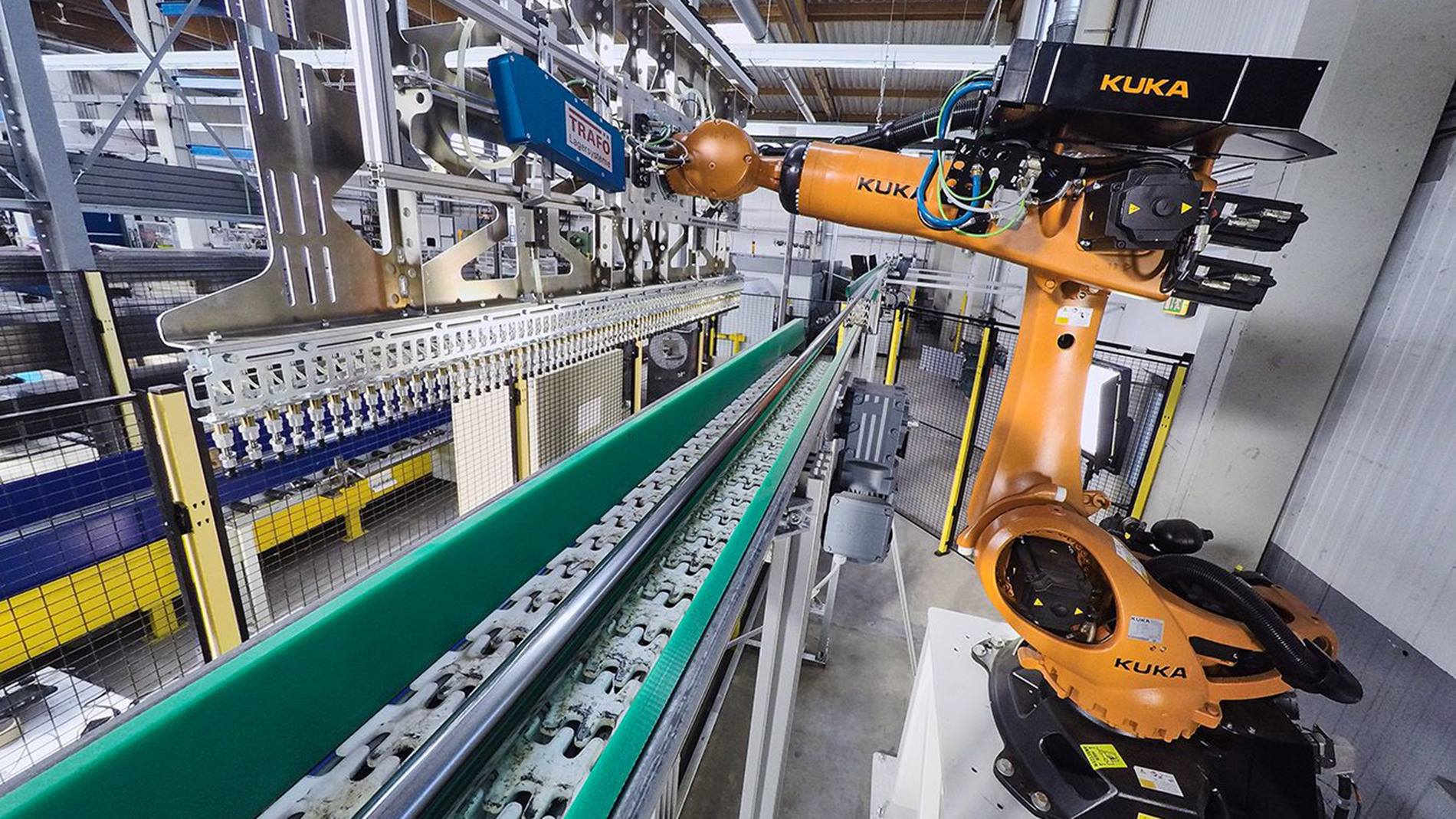
A csőlézer automatizált betöltése tökéletesen a körülményekhez van igazítva
„A pick and place robot különlegessége, hogy egyesével helyezi be a csöveket a lézerbrendezésbe” - mondta Ulrich Neckermann, Trafö németországi, ausztriai és svájci értékesítési menedzsment. „Nincs többé szükség manuális betöltésre.“ A Trafö egy speciális szoftvert fejlesztett ki a berendezéshez. Ennek a szoftvernek a segítségével az összes érintett részegység kommunikálni tud egymással. Digitális termelési tervek adják meg, hogy a rendszer milyen csőtípusokat töltsön teljesen automatizált módon a lézer felé. Az anyagokat tablettel lehet megrendelni a hosszúáru-raktárból. A raktárrendszer egy a raktártól a robotig és onnan a lézerhez vezető szállítóberendezéssel, kazettákban viszi a megrendelt csöveket a robotcellához. A felülről nyitott kazettákban általában különböző csőtípusok találhatók. A robot a tárgyfelismerés érdekében 3D-s felismerőrendszerrel rendelkezik.