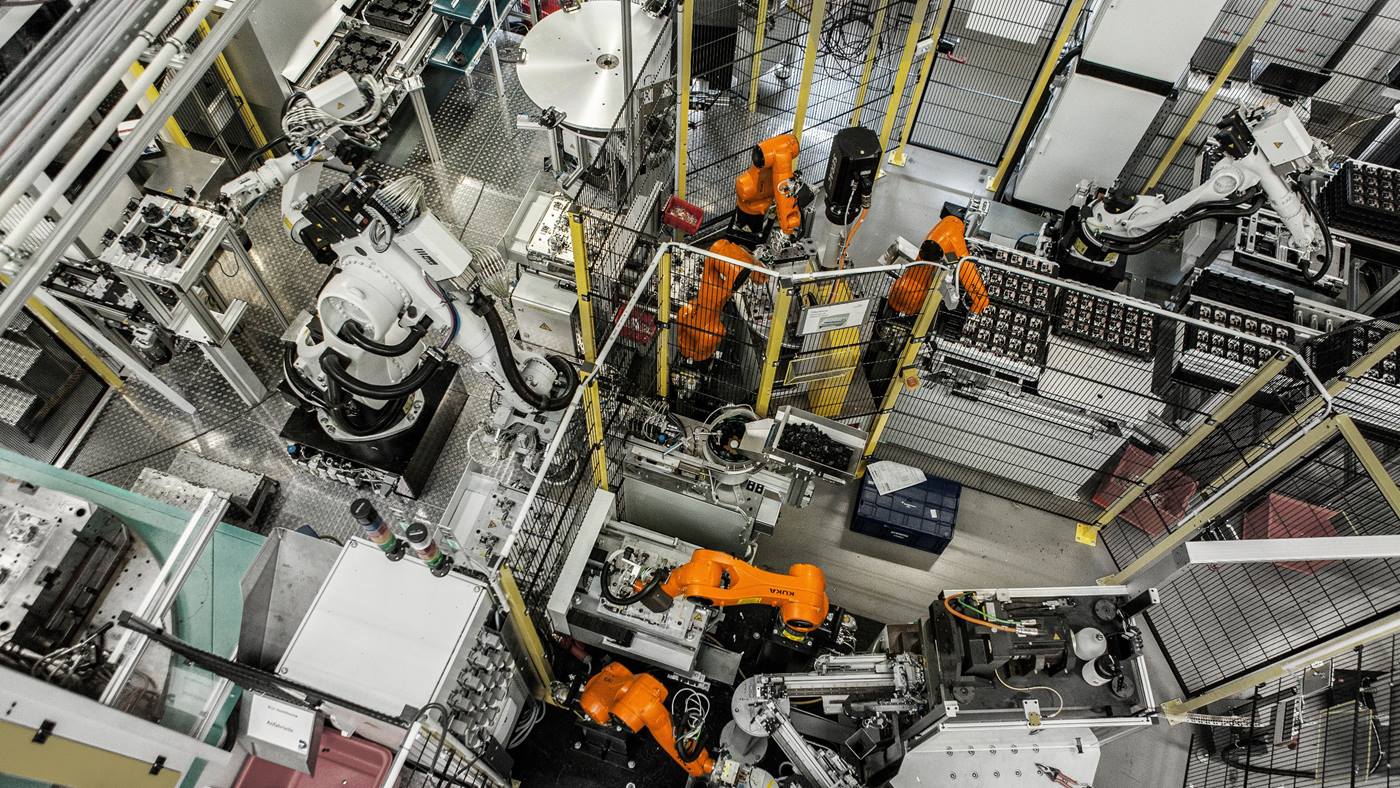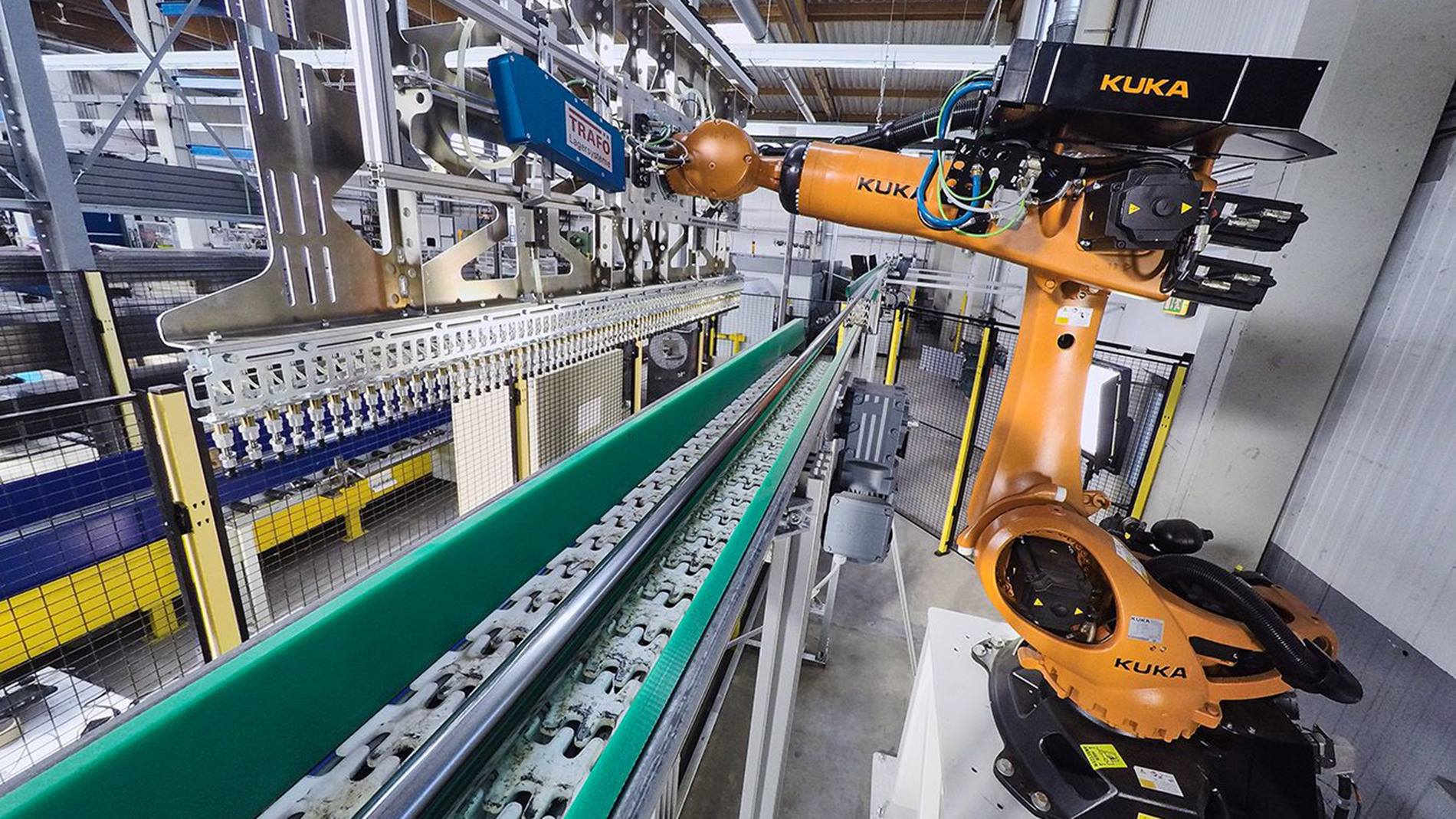
Automatizovaná nakládka trubkového laseru je perfektně upravena na dané podmínky.
„Zvláštností na robotu Pick and Place je to, že osazuje laser jednotlivými trubkami,“ říká Ulrich Neckermann, vedoucí prodeje DACH ve firmě Trafö. „Ruční nakládka odpadá.“ Pro strojní zařízení vyvinula firma Trafö speciální software. Díky němu všechny do tohoto kroku zapojené komponenty spolu vzájemně komunikují. Digitální výrobní plány určují, s kterými typy trubek má být laser plně automatizovaným způsobem naložen. Materiál je organizován přes tablet ze skladu s dlouhým zbožím. Skladový systém dodává objednané trubky pomocí přepravního zařízení, které vede ze skladu k robotu a odtud k laseru, v systémových kazetách k robotické buňce. V kazetách, které jsou nahoře otevřené, jsou většinou uloženy různé typy trubek. Pro zajištění detekce objektu je robot vybaven 3D detekčním systémem.