
กระบวนการเรียนรู้แบบใช้ AI เพื่อการเพิ่มประสิทธิภาพของโมเดล CAD
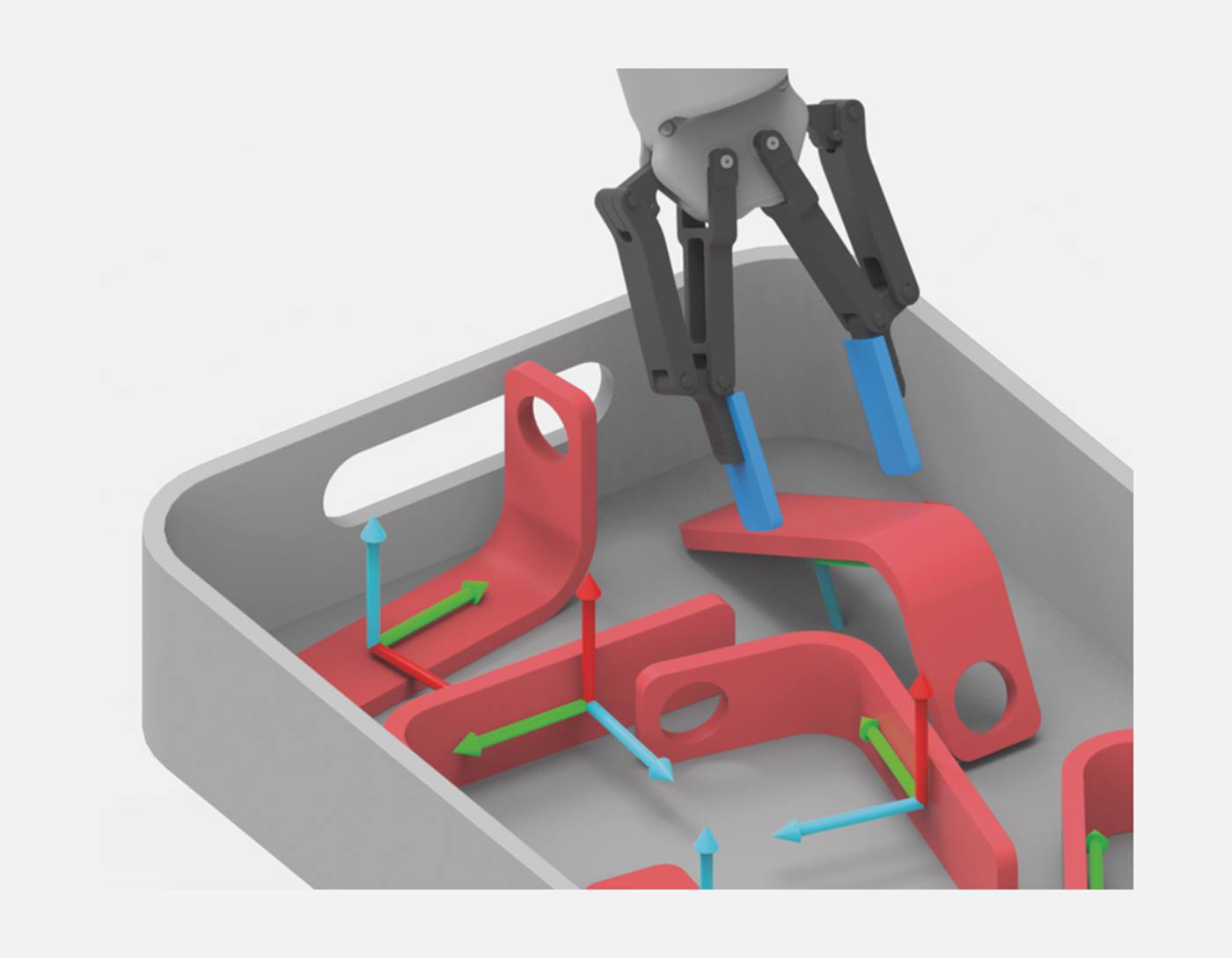
มีการฝึกการรู้จำวัตถุล่วงหน้าในสภาพแวดล้อมการจำลองแบบเสมือนจริง ในสภาพแวดล้อมดังกล่าว มีการเพิ่มประสิทธิภาพให้กับโมเดล CAD ในแง่ของปฏิกิริยาการเกิดสี วัสดุ และสภาพแสง “วัตถุทุกชิ้นที่หยิบออกจากกล่องได้รับการฝึกมาแล้วล่วงหน้าเป็นระยะเวลาหนึ่งในสภาพแวดล้อมจำลองโดยใช้ปัญญาประดิษฐ์ กระบวนการฝึกนี้สามารถดำเนินได้ตลอดทั้งคืน เพื่อให้สามารถใช้งานได้เลยในวันถัดไป” มิชาเอล โฮเฮนแนคเคอ ผู้จัดการกลุ่มผลิตภัณฑ์สำหรับการจัดการและการมองเห็นที่ KUKA กล่าว การใช้ AI จะช่วยเพิ่มประสิทธิภาพให้กับการรู้จำวัตถุใดๆ อย่างเหมาะสม เพื่อให้สามารถแยกแยะสิ่งเหล่านั้นได้แม้ในสถานการณ์ที่ยากลำบาก




