
AI-baserad inlärningsprocess optimerar CAD-modellen
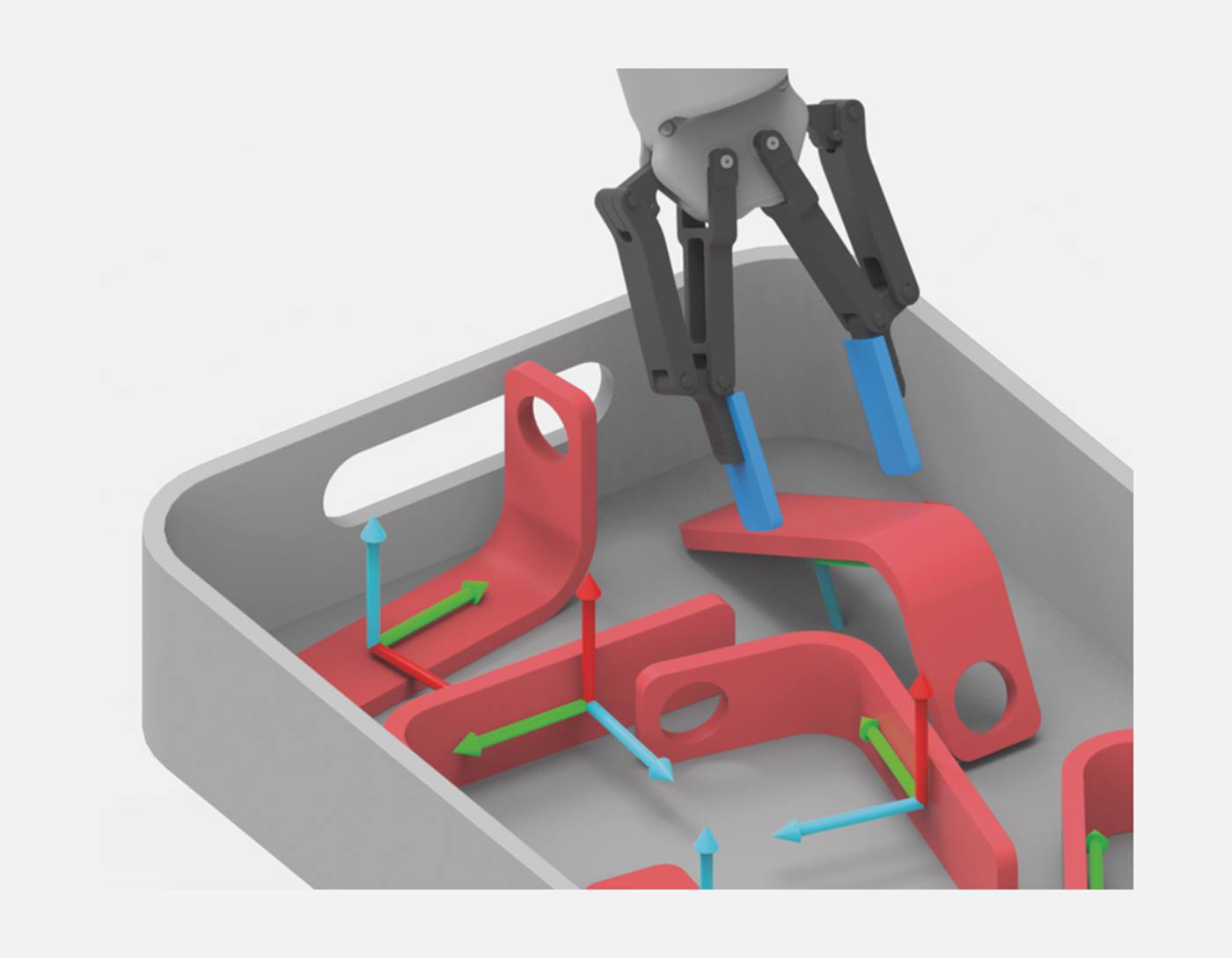
Objektigenkänningen tränas in i förväg i en fotorealistisk simuleringsmiljö. CAD-modellen optimeras då med avseende på färgreaktioner, material och ljusförhållanden. ”Varje föremål som ska plockas ur lådan tränas i förväg i denna simuleringsmiljö med stöd av artificiell intelligens. Inlärningen kan utföras över natten så att applikationen kan användas redan nästa dag”, berättar Michael Hohenäcker, produktchef för Handling & Vision hos KUKA. Med hjälp av AI optimeras igenkänningen av de aktuella objekten så att dessa kan identifieras även i svåra situationer och förhållanden.




