
MI-alapú tanulási folyamat a CAD-modell optimalizálásához
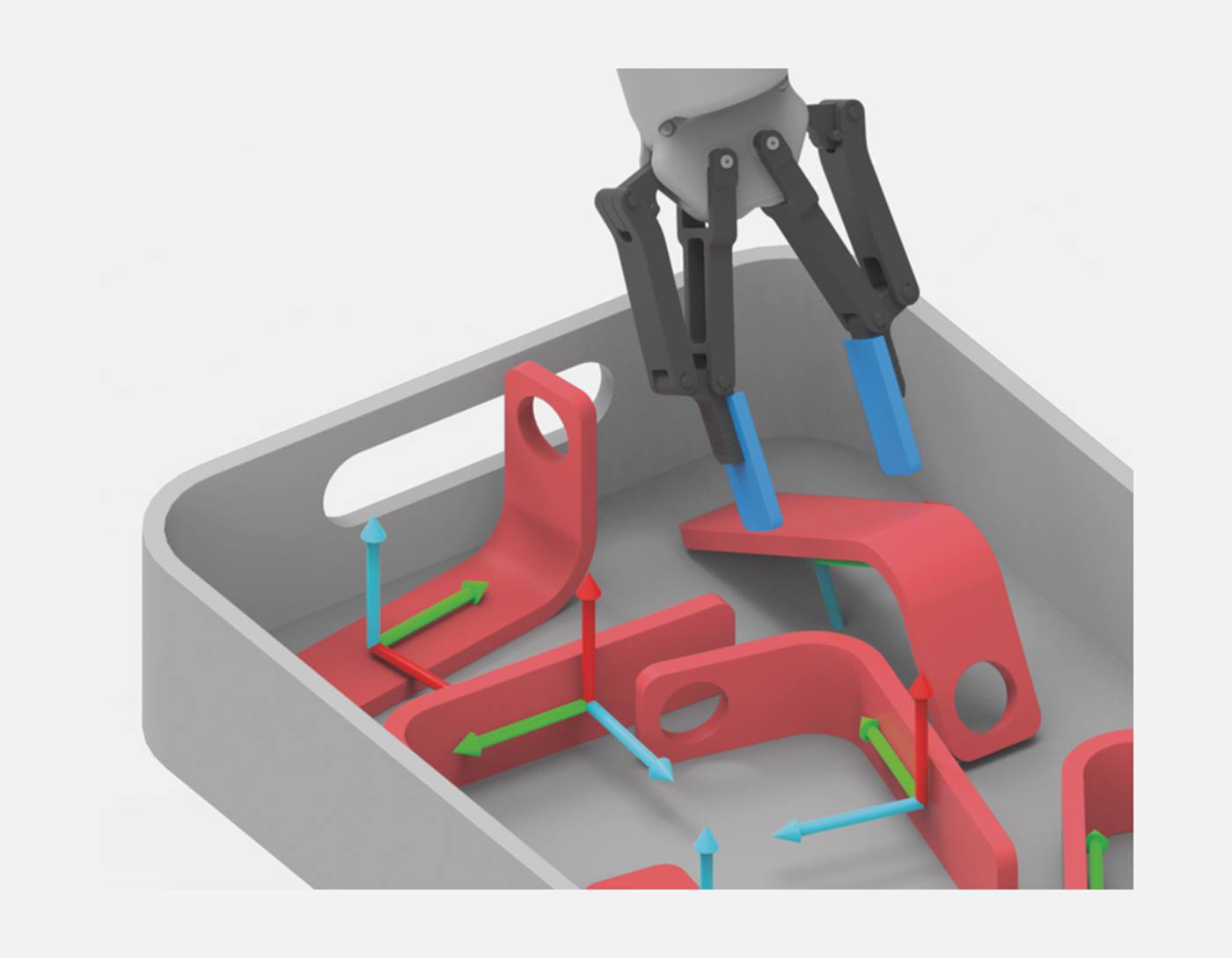
Az objektumfelismerés betanítása előre történik egy fotorealisztikus szimulációs környezetben. Ebben az esetben a CAD-modell a színreakciók, az anyagok és a fényviszonyok figyelembevételével van optimalizálva. „Minden tárgyat, amit egy dobozból kell kivenni, egy bizonyos idő alatt előre betanítanak ebben a mesterséges intelligencia által támogatott szimulációs környezetben. Ez a betanítási folyamat egy éjszakán át tarthat, hogy az alkalmazás másnap is használható legyen”- mondja Michael Hohenäcker, a KUKA mozgatási és vizuális portfóliójának menedzsere. A mesterséges intelligencia használatával a felismerés tetszőleges objektumokra optimalizálható oly módon, hogy azok nehéz forgatókönyvek esetén is azonosíthatóak legyenek.




