
Processus d’apprentissage basé sur l’IA pour l’optimisation du modèle CAO
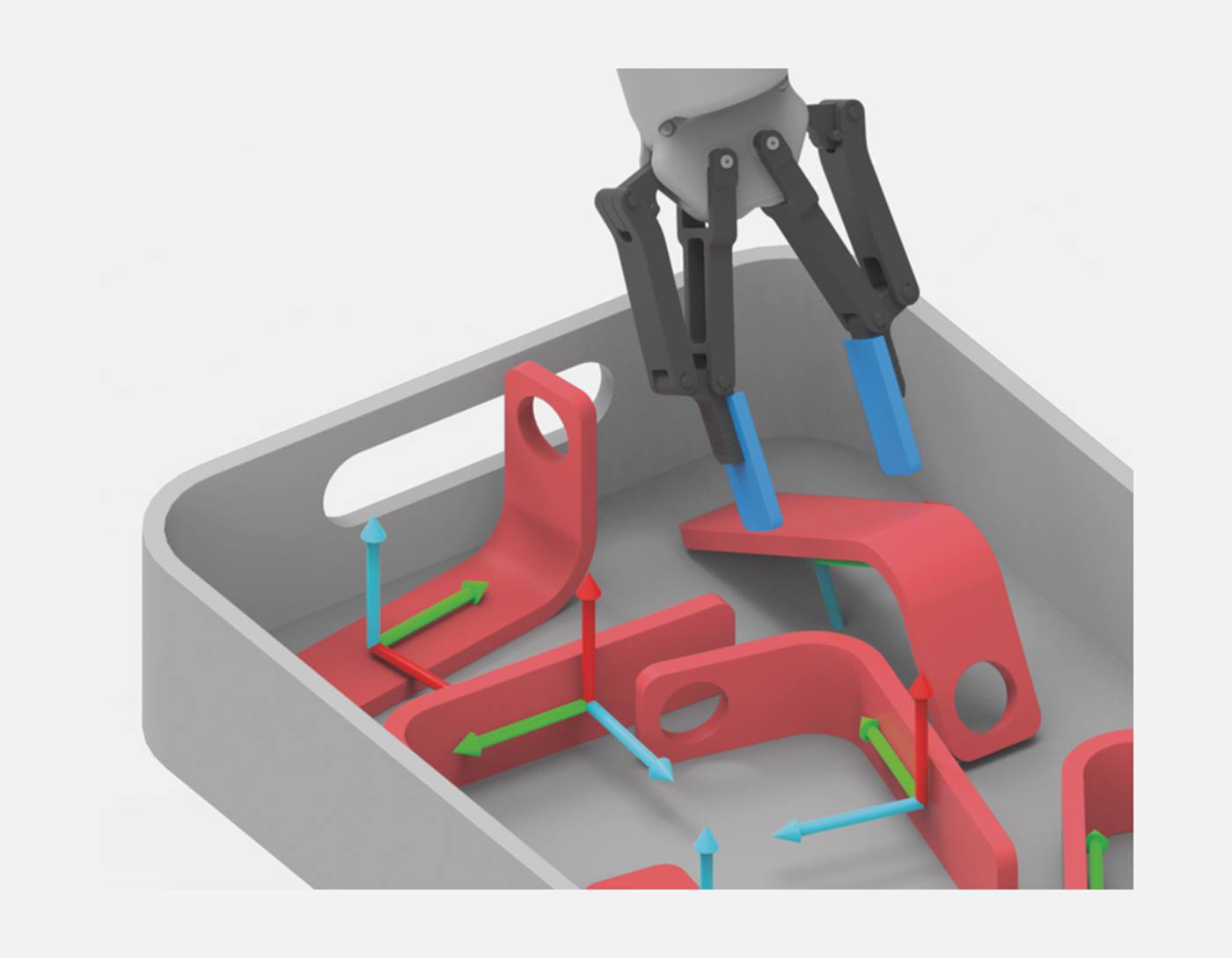
La reconnaissance d’objets est entraînée au préalable dans un environnement de simulation photoréaliste. Dans ce cas, le modèle CAO est optimisé en ce qui concerne les réactions aux couleurs, aux matériaux et aux conditions d’éclairage. « Chaque objet qui doit être saisi dans une caisse est entraîné à l’avance pendant un certain temps dans cet environnement de simulation assisté par l’intelligence artificielle. Ce processus d’entraînement peut se dérouler pendant la nuit, de sorte que l’application peut être utilisée dès le lendemain », explique Michael Hohenäcker, gestionnaire de produits pour la manutention et la vision chez KUKA. L’utilisation de l’IA permet d’optimiser la reconnaissance pour n’importe quel objet de manière à ce qu’il puisse être identifié même dans des scénarios difficiles.




