
KI-basierter Lernprozess für die Optimierung des CAD-Modells
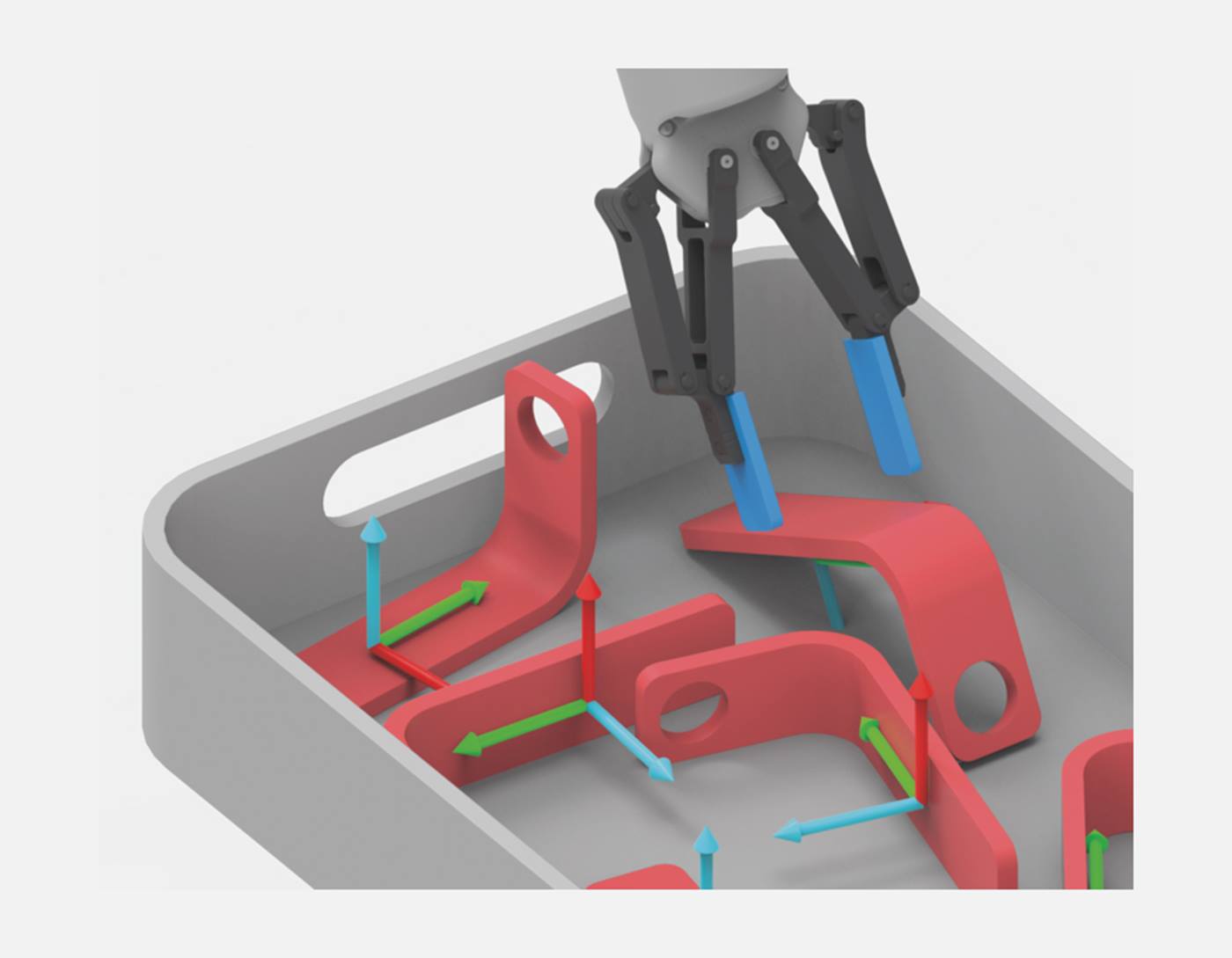
Die Objekterkennung wird vorab in einer fotorealistischen Simulationsumgebung trainiert. Hierbei wird das CAD-Model in Hinblick auf Farbreaktionen, Materialien und Beleuchtungsbedingungen optimiert. „Jedes Objekt, das aus einer Kiste gegriffen werden soll, wird im Voraus in dieser mit künstlicher Intelligenz unterstützten Simulationsumgebung über eine gewisse Zeit trainiert. Dieser Trainingsprozess kann über Nacht laufen, sodass die Anwendung bereits am nächsten Tag genutzt werden kann“, sagt Michael Hohenäcker, Portfolio Manager für Handling und Vision bei KUKA. Durch den Einsatz von KI wird die Erkennung für beliebige Objekte so optimiert, dass diese auch in schwierigen Szenarien identifiziert werden können.




