軟體的應用領域
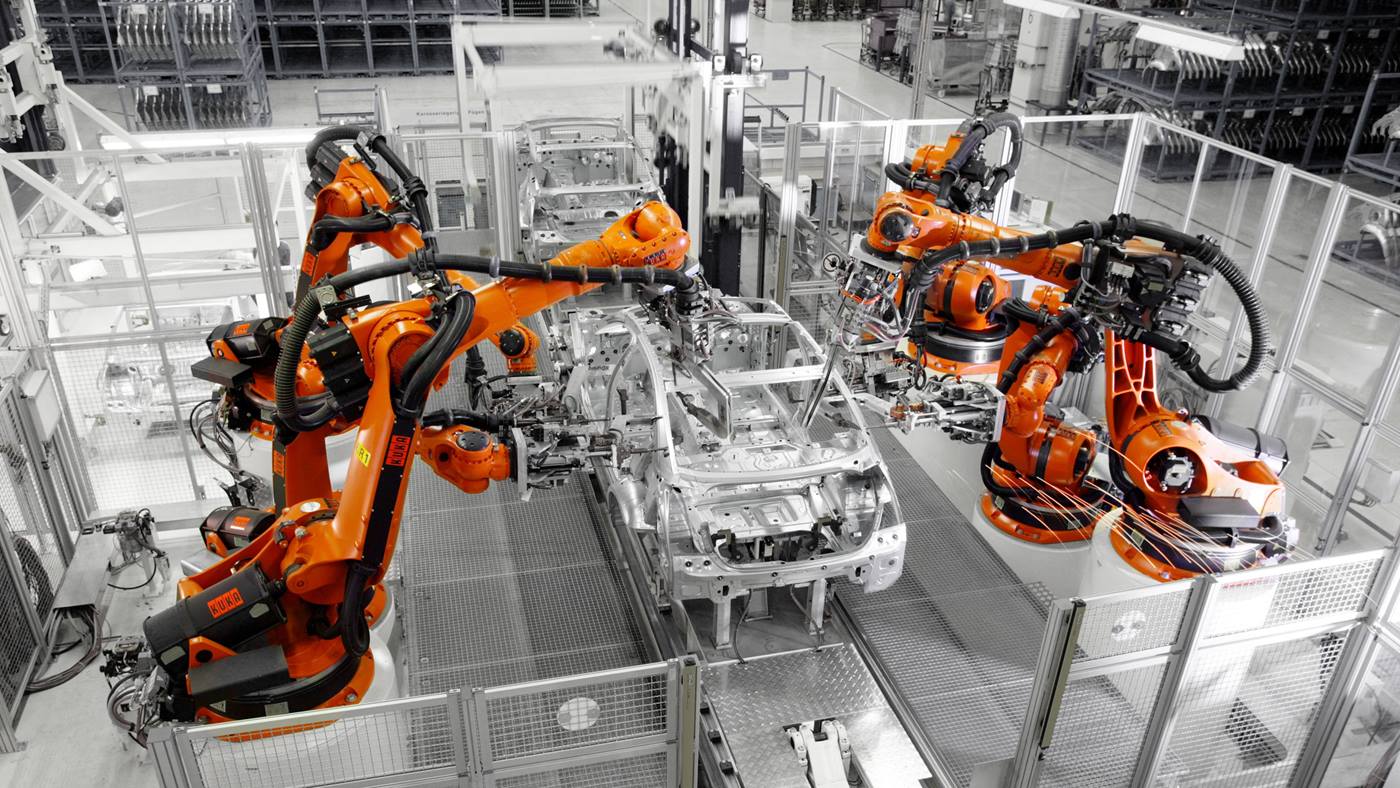
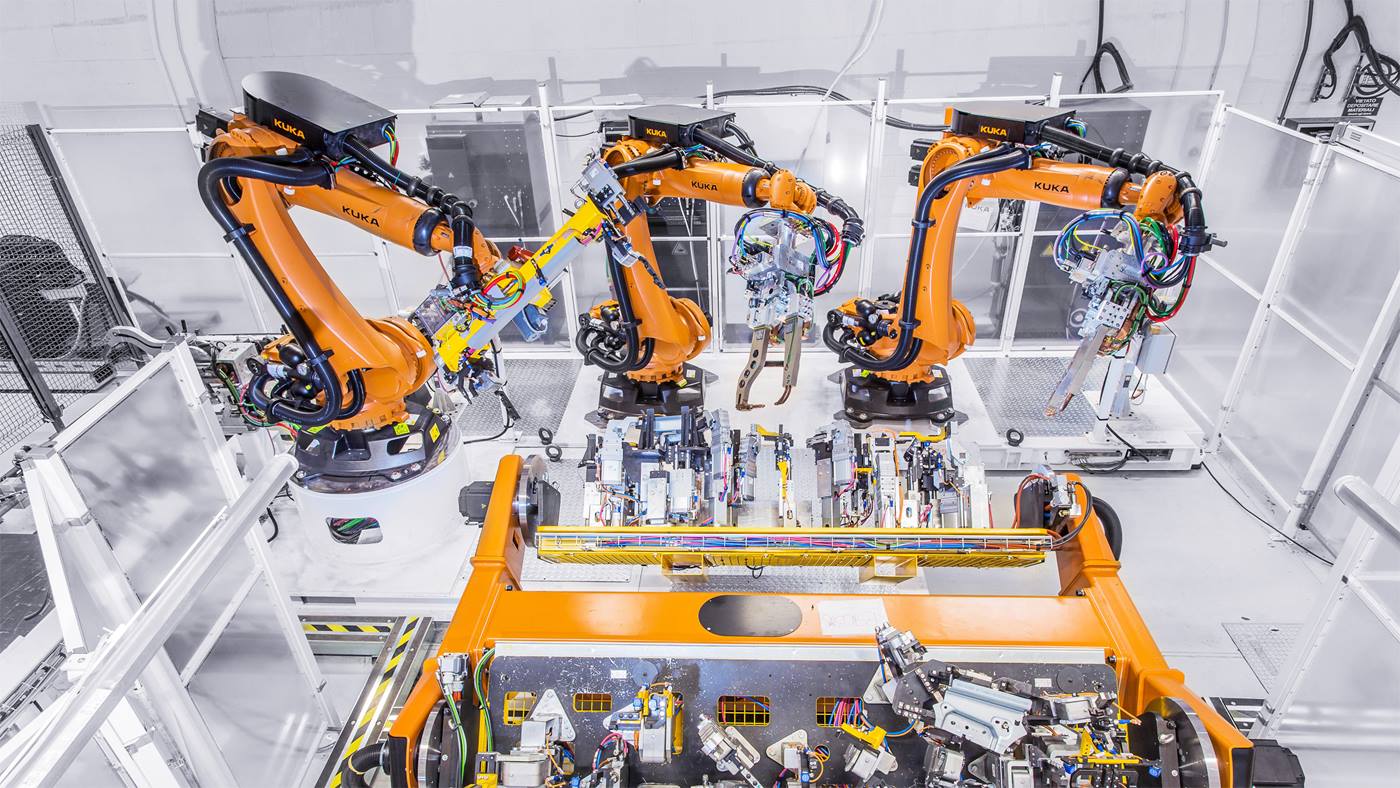
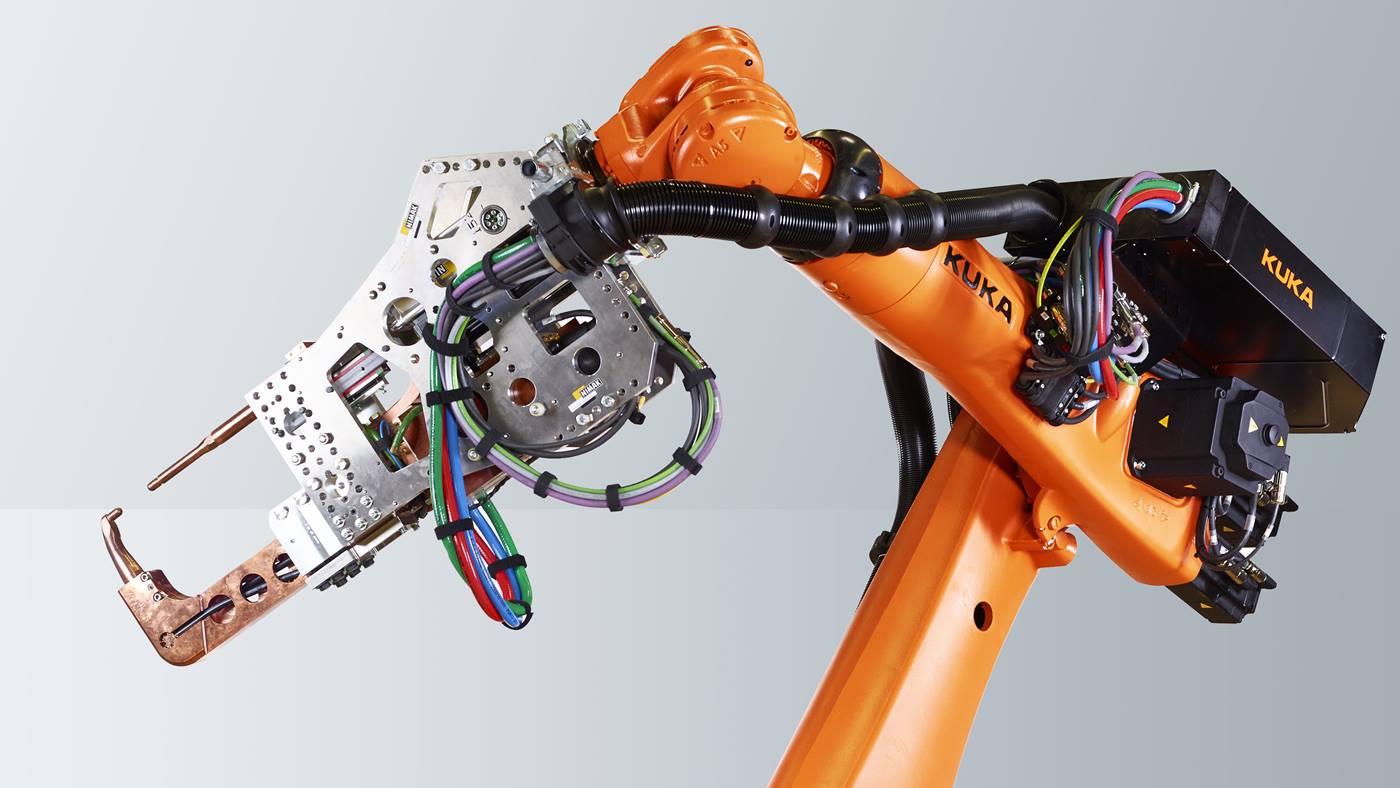
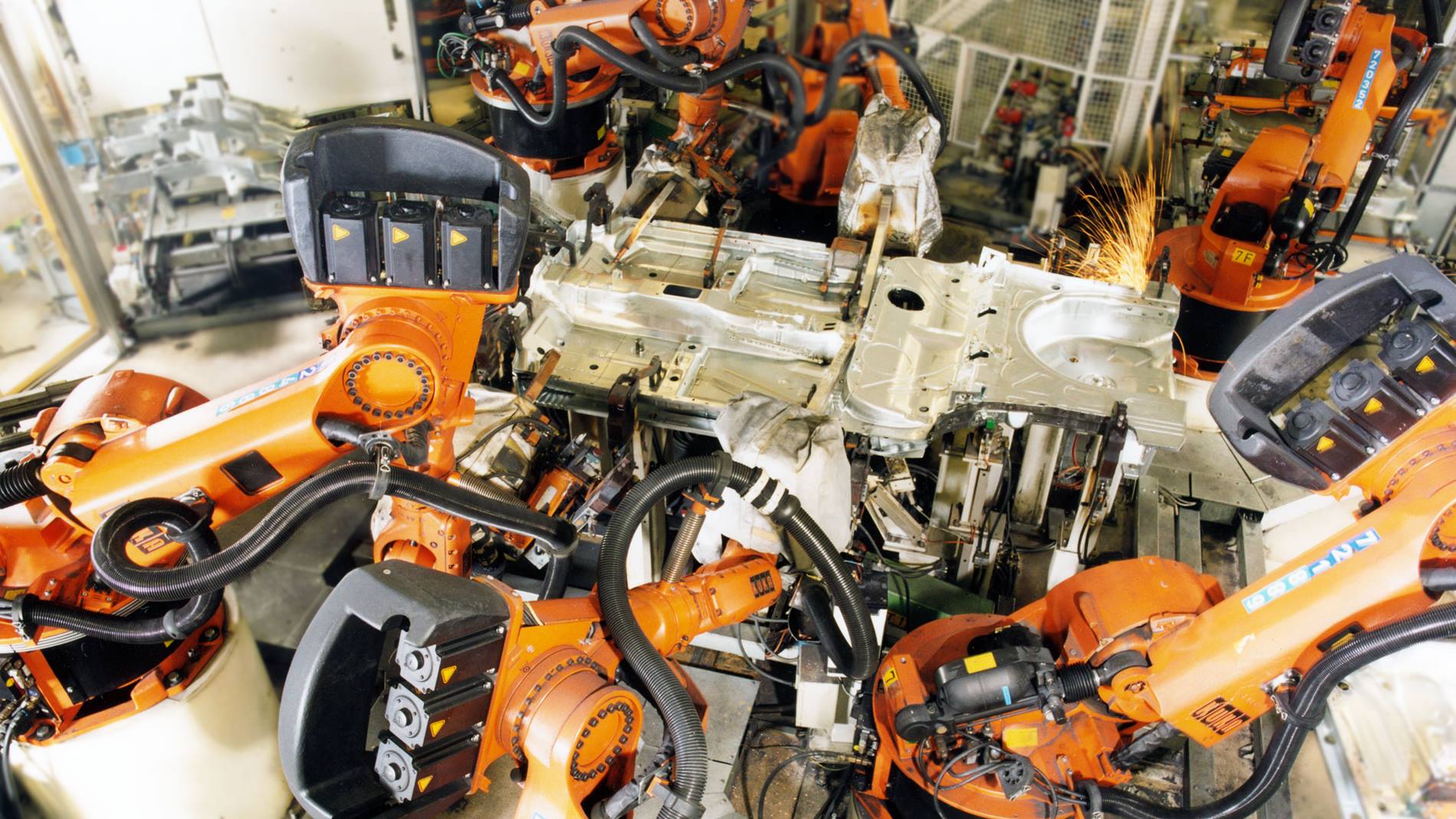
機器人系統可以用 KUKA.Gripper&SpotTech 4.0 控制和監控其工作環境中的工具和抓爪。具體的應用領域為材料處理和使用氣動焊鉗的點焊。可以非常快速簡單地對使用 KUKA 機器人的搬運任務進行編程。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果
用 KUKA.Gripper&SpotTech 軟體可以減少試運轉時間,並簡化問題的處理過程。讓您的機器人系統能夠控制工作環境中的工具和抓爪。
機器人系統可以用 KUKA.Gripper&SpotTech 4.0 控制和監控其工作環境中的工具和抓爪。具體的應用領域為材料處理和使用氣動焊鉗的點焊。可以非常快速簡單地對使用 KUKA 機器人的搬運任務進行編程。
KUKA.GripperSpotTech 4.0 是 GripperSpotTech 3.x 的後繼產品,可以提供更加豐富的功能。由於這個原因,它與先前的版本並不相容。