KUKA nutzt Künstliche Intelligenz in eigenen Produkten und Lösungen. Über all dem steht grundsätzlich immer ein Ziel: Unseren Kunden den Zugang zu Automatisierung so einfach wie möglich zu machen. In Zukunft wird Künstliche Intelligenz dazu einen großen Beitrag leisten.
Wir zeigen euch zwei Anwendungen:
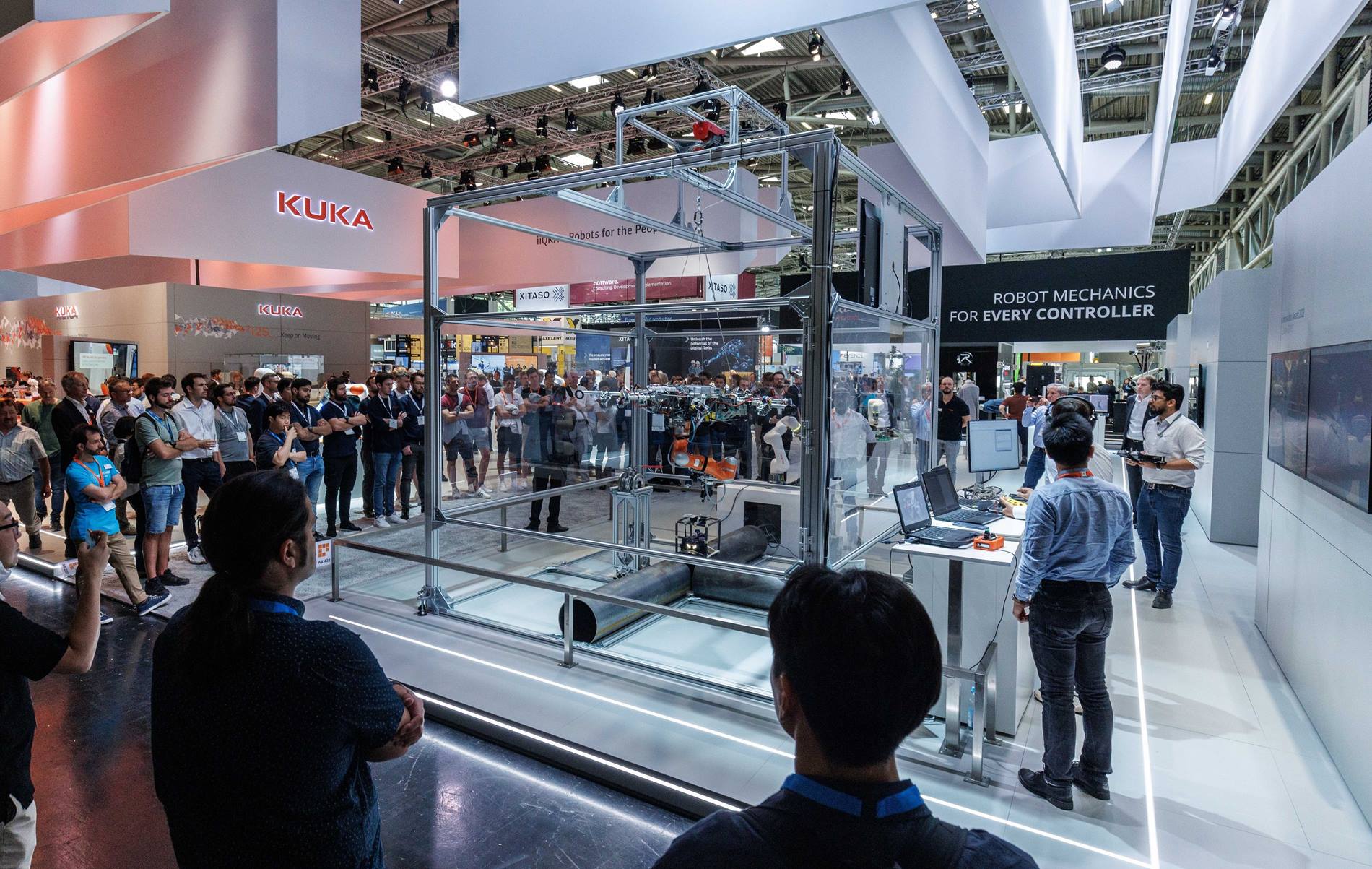
In der Simulation testen, was auf der Robotersteuerung noch zu heikel wäre
Ein Team bei KUKA arbeitet aktuell daran, dass KI beim Erstellen des Programmier-Codes unterstützt. Dazu wird generative AI genutzt. Langfristig soll KI sogar die klassische Eingabe, wie sie aktuell über das KUKA smartPAD erfolgt, ergänzen. Dann wäre es möglich, dass Endanwender sogenannte Prompts, also Texteingaben wie Fragen oder in alltäglicher Sprache, direkt an die KI geben. Die KI erstellt dann den Code, um den Roboter für die jeweiligen Aufgabe zu programmieren.
Was hier aktuell entsteht, ist also ein KRL-Chatbot. KI-generierten Programm-Code direkt auf der Robotersteuerung zu testen, wäre jedoch noch zu gefährlich. Da ist sich die gesamte Industrie einig. Daher liegt es nahe, die Simulations-Umgebung genau dafür zu nutzen. Mit einem Digitalen Zwilling können solche Entwicklungen ideal getestet werden – auch wenn der KI-Code noch Logikfehler enthält und der Roboter trotz Stopp-Befehl einfach weiterfährt. Eine Kollision in der simulierten Umgebung ist viel einfacher zu verkraften.
Eines Tages wird sich das aber ändern, die KI dann sogar deutlich zuverlässiger programmieren als der Mensch und sogar auf fehlerhafte Eingaben souverän reagieren können. Dann werden diese Modelle in die reale Welt übertragen und dort Aufgaben als KI-Assistenten übernehmen.
Griffqualität verbessern: KI im ItemPiQ von Swisslog
Im Durchschnitt haben die Kunden von Swisslog 8.000 – 10.000 verschiedene Produkte in ihren Sortimenten – seien es Lebensmittelkonzerne oder Unternehmen aus der Pharmaindustrie, von Mode und Bekleidung über Elektronik und schnelllebige Konsumgüter bis hin zu Lebensmitteln und Getränken. Es liegt auf der Hand, dass die Verpackungen bei solchen Sortimenten höchst unterschiedlich sind: Große und kleine Kartons, Tüten oder einzelne Plastikflaschen.
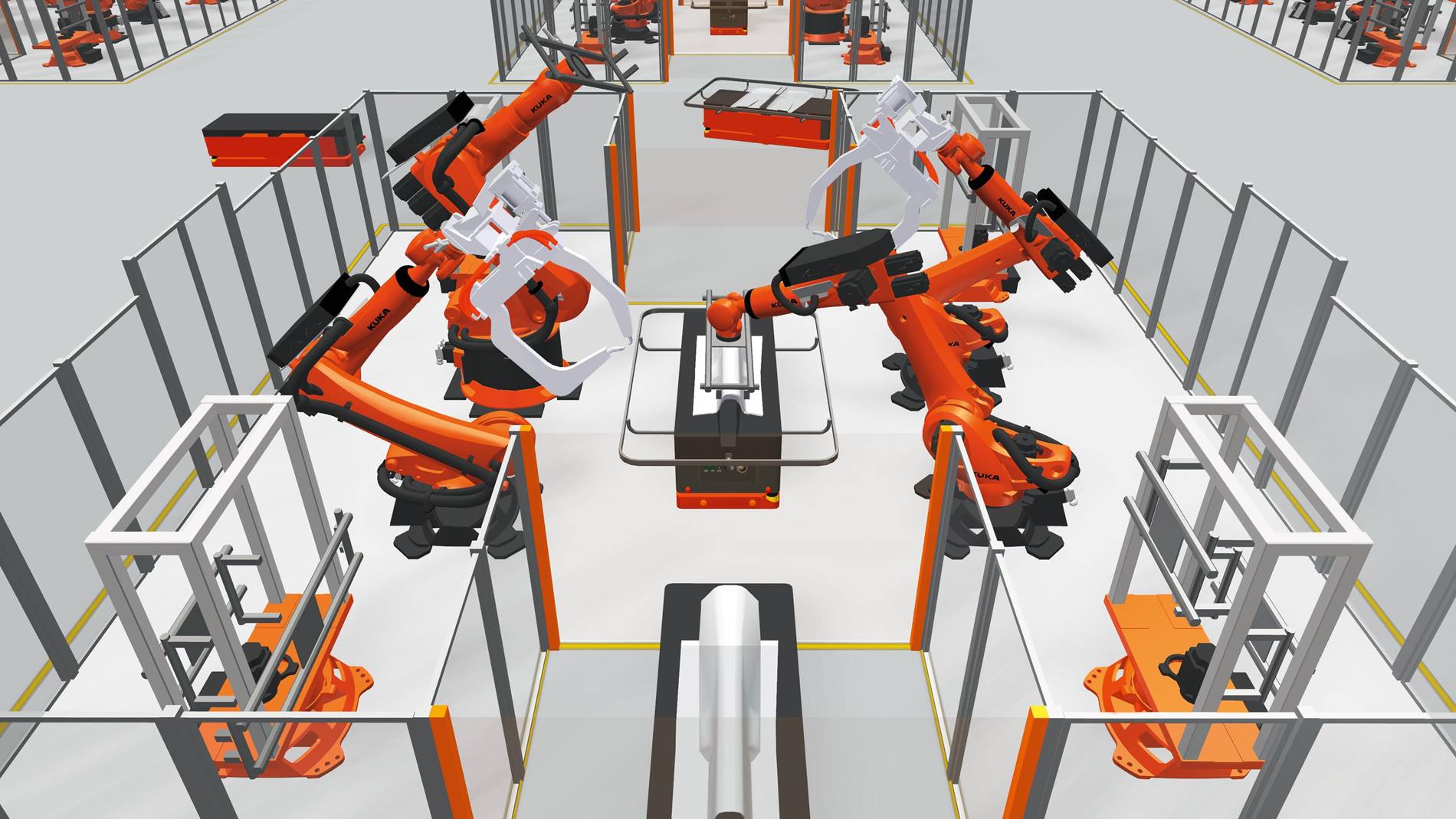
Jeden Tag müssen diese unterschiedlichen Artikel kommissioniert, also für einen Kunden- oder Auslieferungssauftrag, zusammengestellt werden. Das passiert mit dem ItemPiQ von Swisslog vollautomatisch. ItemPiQ ist ein KI- und Kamera-gestützter Artikelkommissionier-Roboter. Er kann seinen Greifer autonom wechseln und sich so den verschiedenen Verpackungen anpassen.
Swisslog arbeitet schon seit einiger Zeit daran, mit Hilfe von KI-Modellen die Griff-Qualität zu verbessern. KI-Modelle selbst zu trainieren und zu verbessern, passiert bei Swisslog auf drei Arten:
- Mit bestehenden Daten, die innerhalb der Community öffentlich zugänglich sind und zur allgemeinen Verfügung stehen.
- Typischen Kundendaten, die auf Grundlage der Swisslog-Erfahrung künstlich generiert wurden.
- Über ein Fine-Tuning mit realen Kundendaten.
Was kann KI beim ItemPiQ optimieren?
Zum einen geht es darum, einen stabileren Griff zu haben, quasi die Picking-Qualität zu steigern.
Dann soll ItemPiQ zudem eine gewisse Intelligenz beigebracht werden. Das System soll wissen, welche Artikel es da gerade greift - um zu verhindern, dass es falsche Artikel kommissioniert oder ein Stück Pappe in der Kiste für ein Produkt hält. Im KI-Sprech ist damit das Feld der „Context Awareness“ gemeint.
Für bildgestützte Robotersysteme bietet sich eine KI-Unterstützung natürlich an. Die Frage, die sich aktuell nur noch stellt, ist: Wie lasse ich solche Systeme weiterlernen? Im Sommer hat der Kunde wahrscheinlich viele Produkte in Tüten, im Winter in Kartons. Wie schafft man es dann, dass die KI den Sommer über nicht verlernt, wie der Greifer am Roboterarm im Winter Kartons greifen muss? Dieses Thema der „Modell-Updates“ treibt aktuell noch Viele um.
Dennoch ist es bald an der Zeit, die KI-Modelle in die Praxis zu geben. Denn eine Labor-Umgebung unterscheidet sich immer von der Praxis.