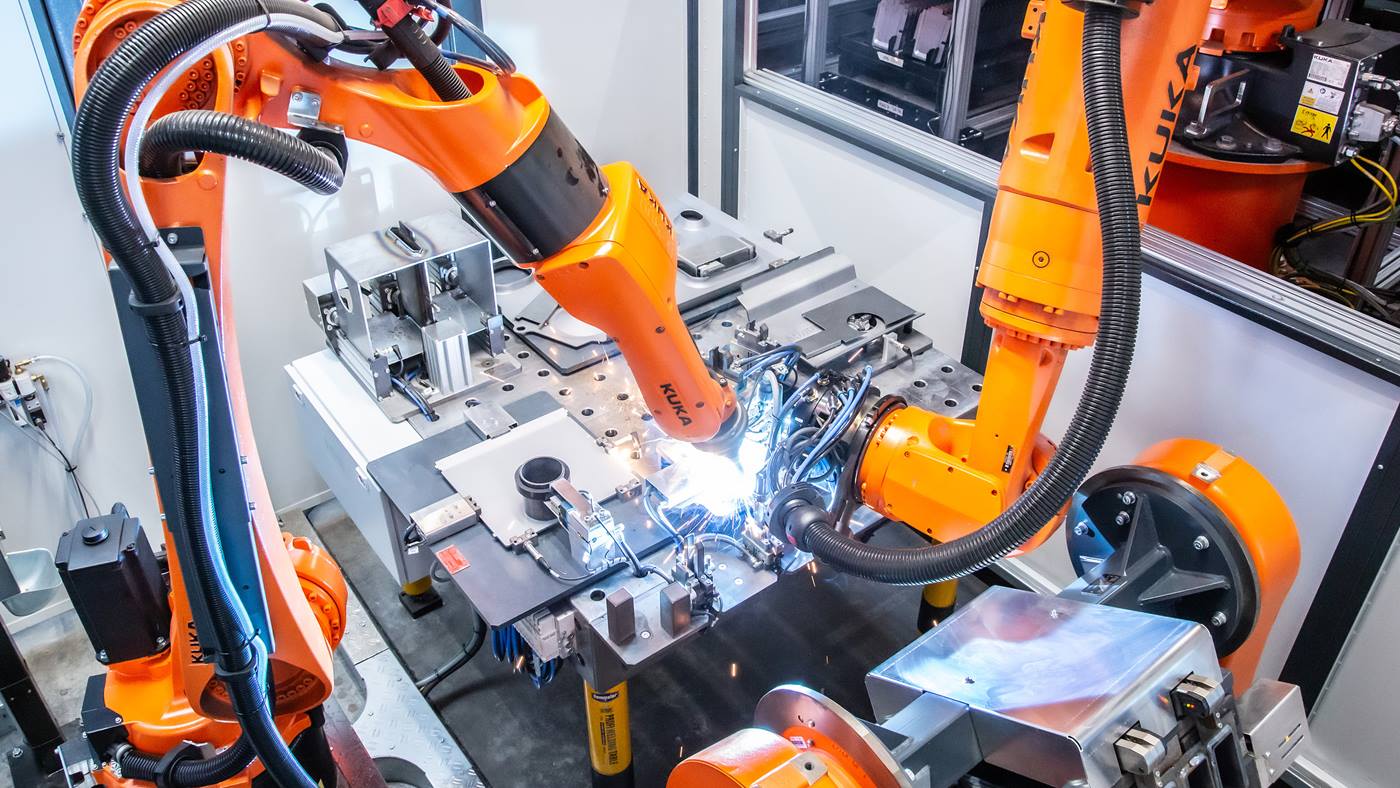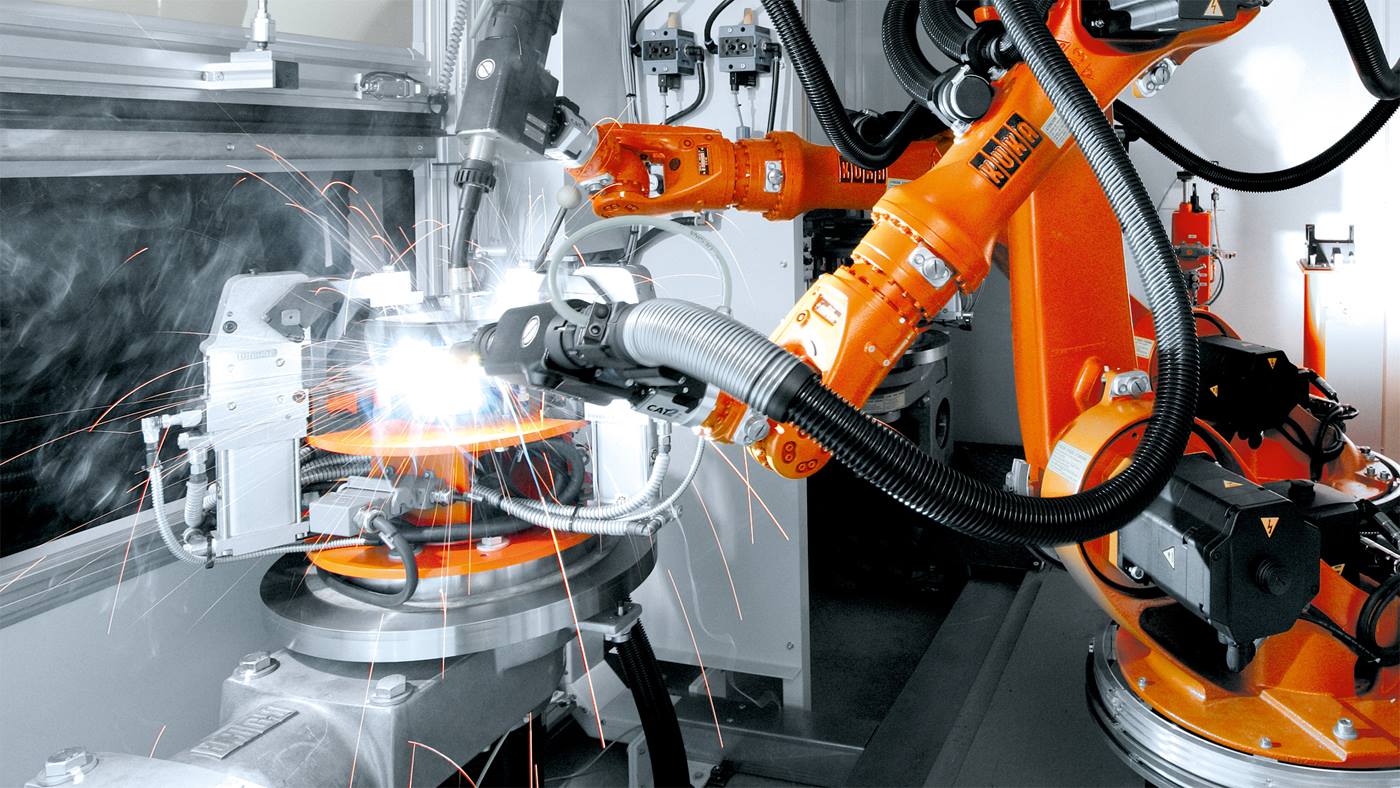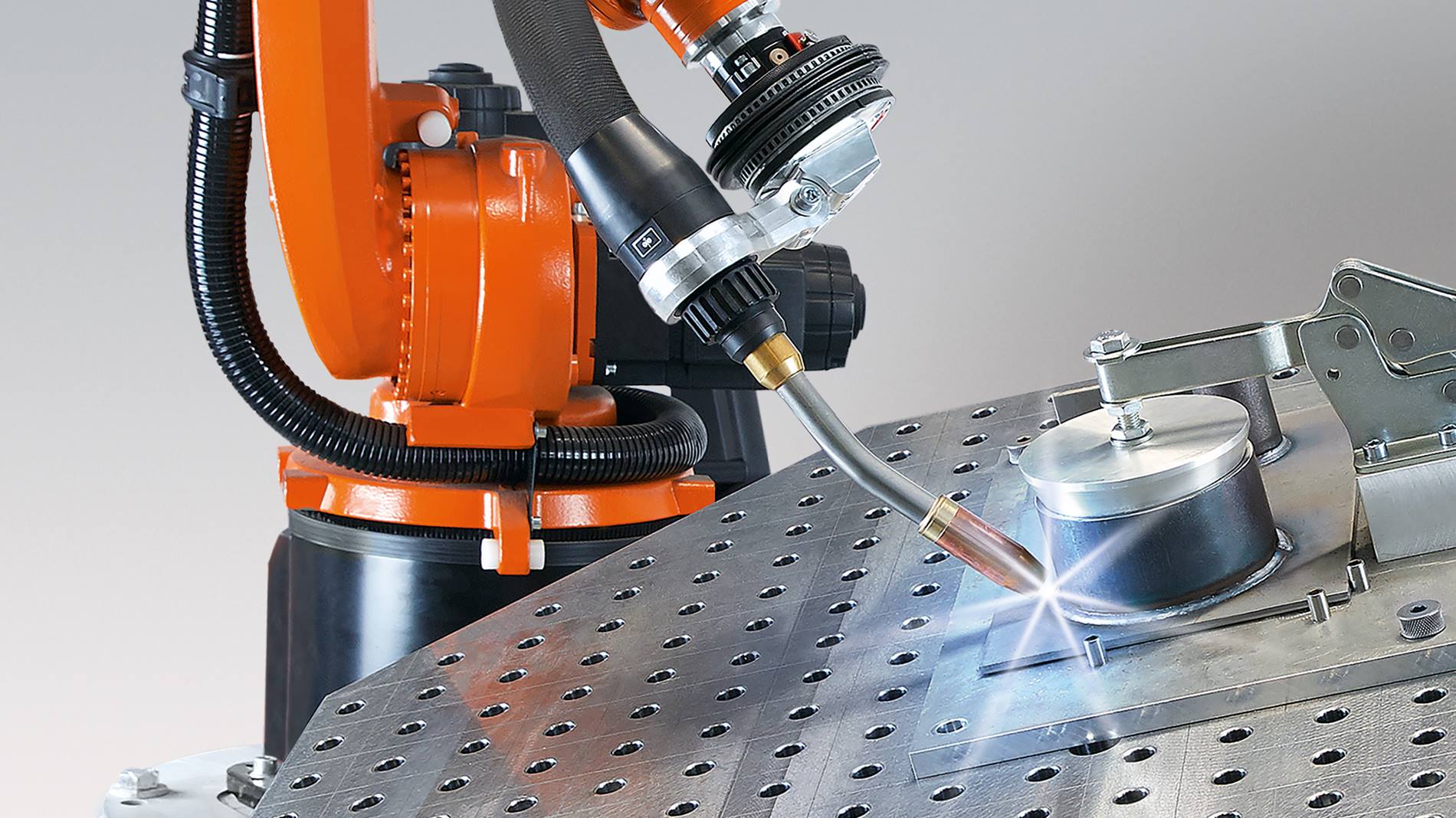
Maximum cost-effectiveness and flexibility: arc welding robots for all requirements
Benefit from special-purpose robots for arc welding with payload capacities from 6 to 22 kg, reaches of up to 3,100 mm in two different designs as in-line wrist robots or hollow-wrist robots. Innovative welding software, such as KUKA.ArcTech, and numerous positioners and linear units round out the broad KUKA range – for ideal complete solutions in welding automation and the best possible performance of your system.