インダストリー4.0:マトリックス生産によるフレキシビリティ
インダストリー4.0の時代に進行していく個別化は生産を変革します。流動的な市場状況のため、小さなロット数を経済的に採算がとれるよう生産することがますます重要になります。具体的には、その課題は特に、製品の仕様やモデルの数が増加し、個数に変化をつけて生産することにあります。こうした課題は、例えば自動車産業における個別化の度合いの高まりによって発生します。
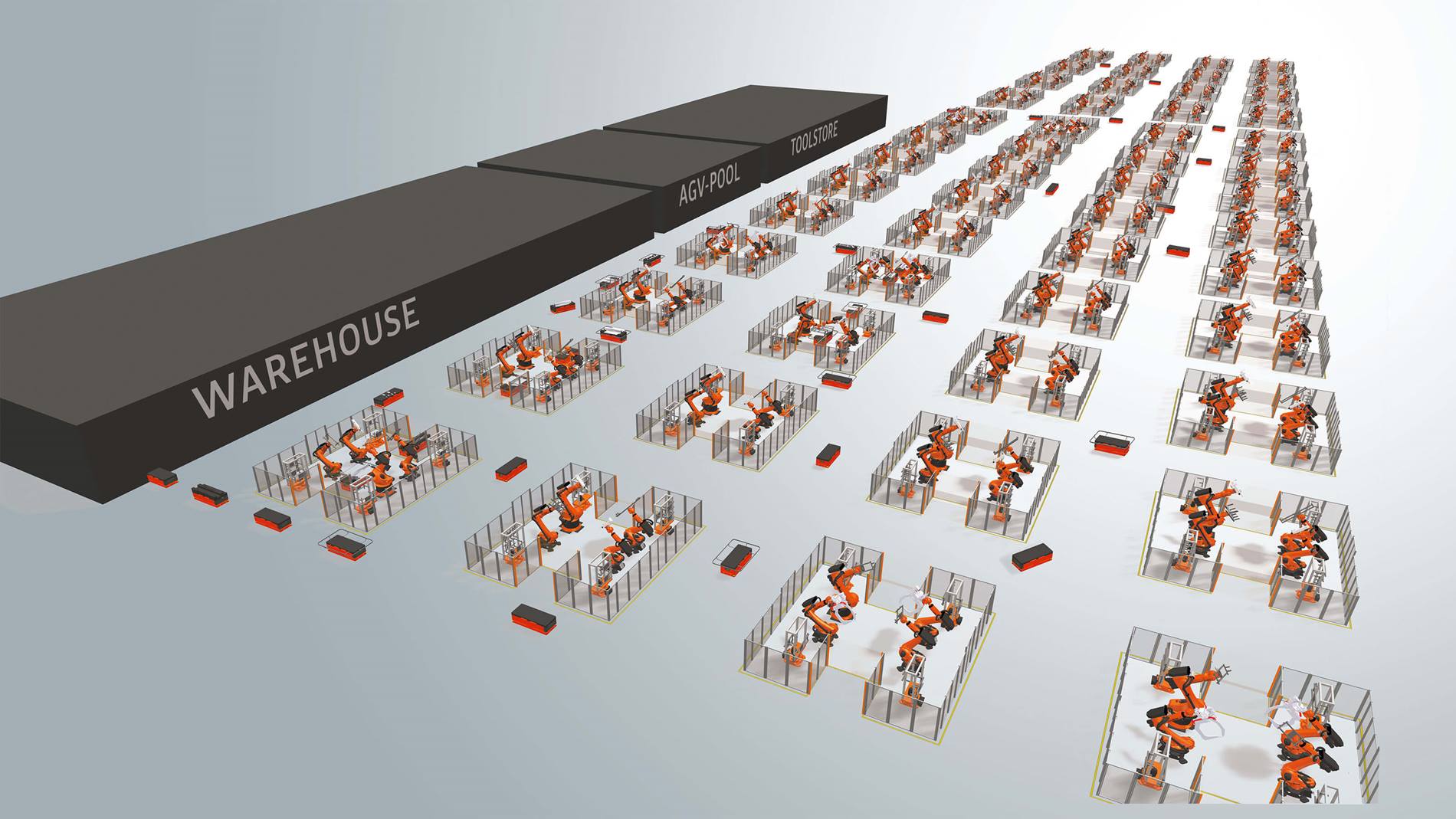
マトリックス生産のコンセプトは将来、プロセスチェーン全体にわたってネットワーク化された、非常にフレキシブルな産業基準の生産を可能にします。プラントは変化する製品タイプに合わせて自動的に「臨機応変」で段取り替えすることもできます。その際に待ち時間や生産停止がありません。それによって、インダストリー4.0の重要な要素としての個別化したシリーズの生産が、工業的大量生産の枠内において無制限に実現可能となります。
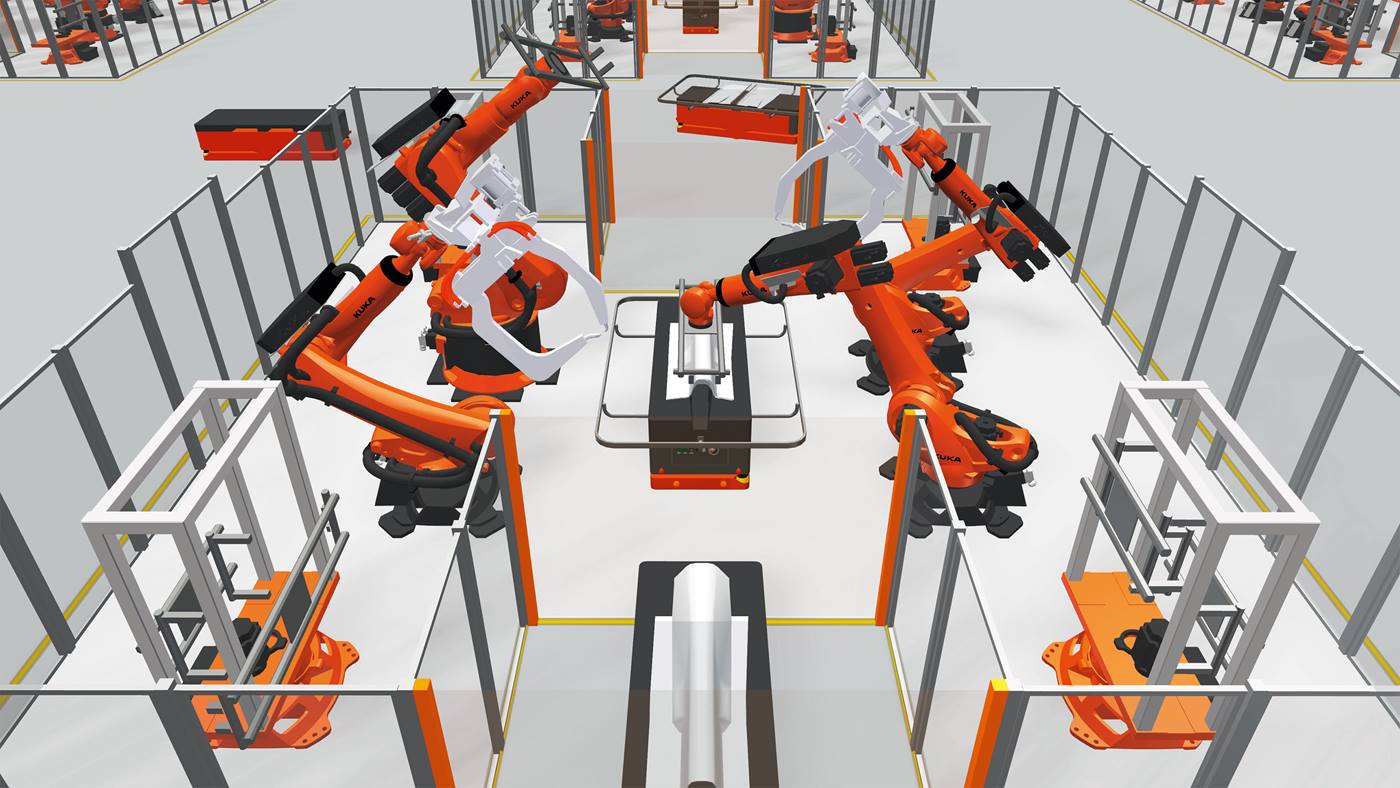
部品や工具の搬送は無人搬送車(AGV)によって行われます。これらはSLAMナビゲーションアルゴリズムを利用して、個々のセルに自動的に移動します。目的のセルに到達すると、ロボットが部品を取ります。
Jigless-Bodyshopテクノロジーのようなインテリジェントなロボットベースのアプリケーションによって、これらの部品が加工されます。その際、最初のロボットがいずれかの部品を取り、2番目のロボットが別の部品を取ります。両方の部品が1つのユニットに結合され、3番目のロボット、いわゆるプロセスロボットがこれを溶接できるようになります。
部品は倉庫に保管されます。それに対してツールストアでは専用の工具が保管されます。
物流と製造の分離
自律的に走行するAGV(無人搬送車)は、さまざまな部品や工具を個別に構成可能なロードハンドリング装置(LAM)に載せて搬送できます。物流プロセスと製造はマトリックス生産においては分離されています。それがインダストリー4.0の中心的な要件です。このコンセプトにより、多品種対応可能な物流を備えたプラントはいつでもピークの際にフレキシブルに他のセルに切り替えることができます。
また、追加セルをプロセスに加えたり、プロセスから外したりもできます。価値創造の連鎖がそれによって中断されることはありません。物流と生産の論理的な結合はソフトウェアによって行われます。
非常にフレキシブルなマトリックス生産のコンセプトにより、KUKAはインダストリー4.0の要件を工業生産の枠内で一貫して実現しています。