Korzystasz ze starszej wersji przeglądarki Internet Explorer. Aby zapewnić optymalnie działanie, zaktualizuj przeglądarkę
KUKA OccuBot: inteligentny system testowy
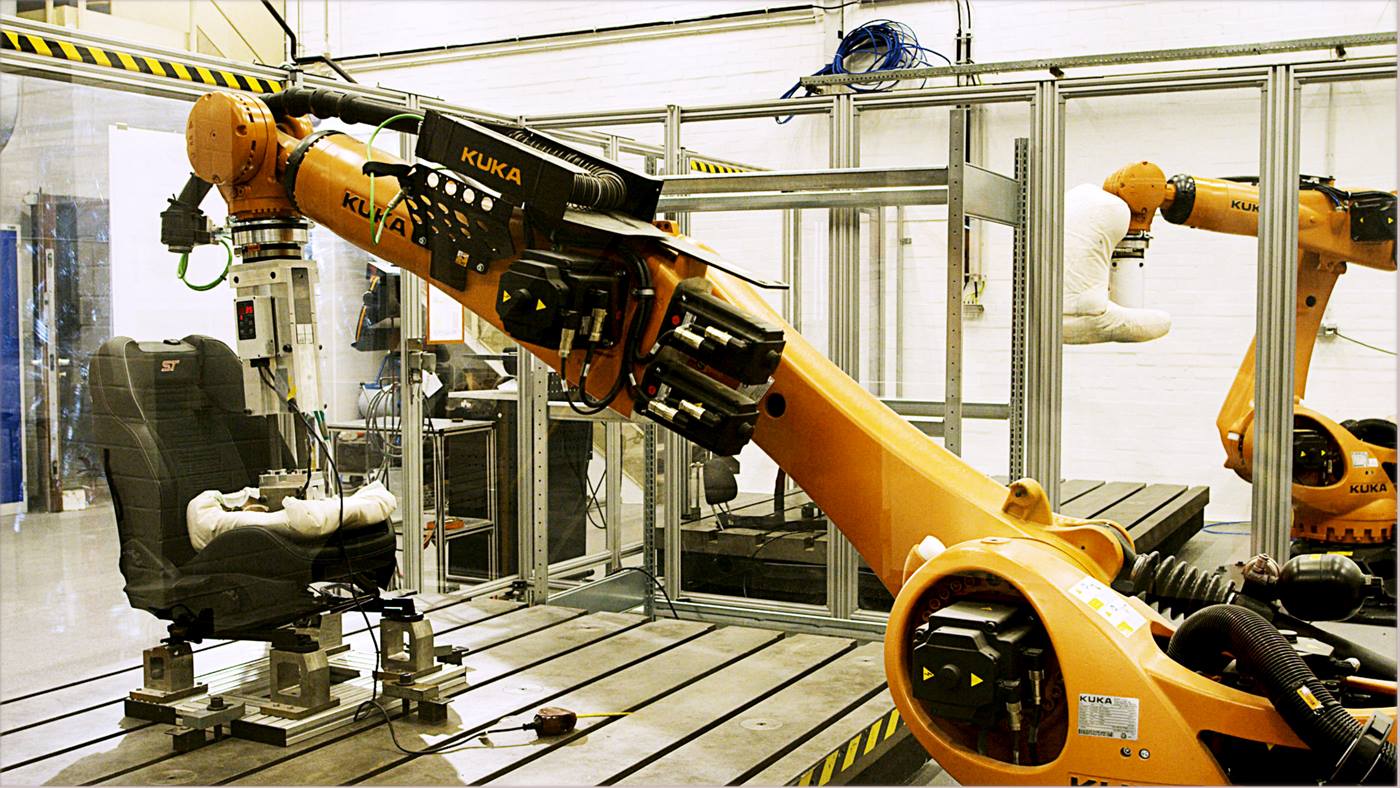
KUKA OccuBot jest całkowicie automatycznym systemem pomiarowym. Z maksymalną precyzją sześcioosiowy robot sprawdza, do jakiego stopnia bezpieczne i stabilne są fotele w pojazdach samochodowych i samolotach przy długotrwałym obciążeniu mechanicznym. W przemyśle meblowym robot OccuBot stosowany jest do sprawdzania mebli przeznaczonych do siedzenia.
Sposób działania OccuBot
System testowy OccuBot składa się z sześciu komponentów, które za pomocą czujników siły i momentów oraz manekinów imitują ruchy człowieka oraz obciążenie wywierane przez niego na fotele. Taki sposób kontroli umożliwia stworzenie w optymalny sposób realistycznych i praktycznych sytuacji, np. podczas wsiadania i wysiadania.
Ponadto OccuBot wykonuje test zużycia materiału. Przykładowo, poprzez wykonywanie ciągłych ruchów obrotowych sprawdza on, jak szybko ściera się materiał na oparciach foteli.
Zalety KUKA OccuBot
Maksymalna elastyczność i precyzja: Dzięki zastosowaniu sześciowymiarowego pomiaru, OccuBot umożliwia określenie sił i momentów z maksymalną możliwą elastycznością i precyzją. Użytkownik uzyskuje dane dotyczące występujących sił i momentów na powierzchniach, na których manekin dotyka siedzenia.
Pomiar ciągły: Podczas każdego cyklu testowego, w którym uczestniczy manekin, następuje dostosowanie sił i momentów odpowiednio do zużycia danego kształtu. Złącze ethernetowe umożliwia podłączenie zewnętrznego systemu do rejestracji danych. Pozwala to na ciągłą obserwację zużycia przez cały czas pracy i zapisanie w pamięci ważnych danych uzyskanych w testach.
Łatwa parametryzacja i efektywne procesy: Pozycja manekina jest dowolnie definiowana w oparciu o znacznik czasu. Dzięki zastosowaniu krzywych robot może sprawdzić każdą pozycję w precyzyjnie zdefiniowanym cyklu czasowym. Jest to możliwe ze względu na zastosowanie różnych funkcji - na przykład edytora do łatwego definiowania podstawowego układu współrzędnych, funkcji "Znajdź/Zatrzymaj" do sił o stałych wartościach lub edycji kilku obiektów testowych.
OccuBot w akcji
Możliwość elastycznego stosowania: Oprócz możliwości obciążenia fotela samochodowego, OccuBot sprawdza również działanie ogrzewania fotela.
OccuBot: komponenty i zakres dostawy
OccuBot składa się z sześciu komponentów. Dzięki ich współdziałaniu można go stosować jako bezpośredni, całkowicie automatyczny system testowy. W zakres dostawy wchodzą następujące komponenty:
Robot: KR QUANTEC
Podstawą systemu testowego KUKA OccuBot jest KR 250 R2700-2 , robot przemysłowy z serii KR QUANTEC. Dzięki sześciu zastosowanym w nim osiom może swobodnie i maksymalnie elastycznie poruszać się w przestrzeni. Pozwala to na uzyskanie przez osie pełnego dostępu do wszystkich możliwych do ustawienia pozycji fotela, a ich solidne wykonanie jest gwarancją optymalnego przygotowania do najtrudniejszych nawet warunków testu przy dużym obciążeniu.
Robot KR 250 R2700-2 z serii KR QUANTEC stanowi podstawę systemu OccuBot.
Układ sterowania: Standardowy KR C4 ed 2015
KR QUANTEC jest sterowany za pomocą dodatkowych komponentów systemu KR C4 ed 2015. Jest to system sterowania złożony z mocnego modułu szafy, który oprócz swojego sprawdzonego standardu zawiera także - przeznaczony specjalnie dla systemu testowego OccuBot - czujnik siły i momentu oraz przynależną do niego skrzynkę czujników.
Układ sterowania KUKA KR C4 ed 2015 to serce systemu OccuBot.
Czujnik: Czujnik siły i momentu FT-NET Omega 160
Bardzo precyzyjny pomiar wykonywanych ruchów i wywieranego obciążenia obywa się w systemie OccuBot za pomocą czujnika siły i momentu FT-NET Omega 160. Jest on zamocowany na kołnierzu KR QUANTEC. W regularnych cyklach odbywających się co 12 milisekund czujnik sprawdza dane pochodzące z pomiarów technicznych i pomiarów pozycji robota, protokołuje je i przesyła do dalszej analizy.
Zastosowany w OccuBot czujnik FT-NET Omega 160 rejestruje wszystkie dane pomiarowe w cyklach co 12 milisekund.
Obsługa: KUKA SmartPad
Dzięki SmartPadowi KUKA obsługa systemu OccuBot jest wyjątkowo łatwa i nadzwyczaj komfortowa: Konfigurację testową do kontroli foteli wprowadza się po prostu na etapie programowania. Intuicyjny interfejs z 8,4-calowym, antyrefleksyjnym ekranem dotykowym o przyjemnej wielkości, pozwala - przy współpracy z układem sterowania KR C4 - na kierowanie nawet ośmioma osiami bez konieczności przełączania.
KUKA SmartPad jest wyjątkowo łatwy w obsłudze i maksymalnie mobilny.
Manekin (Dummy): KUKA Dummy OccuForm
W celu umożliwienia symulacji działających sił i momentów w maksymalnie realnych warunkach, w procesie testowym OccuBot wykorzystywany jest manekin KUKA Dummy OccuForm. W efekcie precyzyjnych pomiarów przez czujnik uzyskuje się dokładne dane ze wszystkich punktów, w których manekin styka się z fotelem. Inteligentne oprogramowanie umożliwia automatyczne kompensowanie sił statycznych manekina, dzięki czemu eliminuje się powstawanie dodatkowych sił dynamicznych.
Pełna współpraca podczas każdego testu OccuBot: KUKA Dummy OccuForm.
Oprogramowanie: KUKA.OccuBot
Stosowane do testów OccuBot oprogramowanie KUKA.OccuBot zawiera nie tylko narzędzie do konfiguracji, ale też oprogramowanie użytkowe KUKA.User Tech, KUKA.Workvisual oraz KSS. Te dwa elementy składowe są bezwzględnie konieczne. W ramach opcji można zainstalować jeszcze KUKA.DIS. To trzecie oprogramowanie umożliwia rejestrowanie danych i przesyłanie ich do komputera PC przez złącze USB.