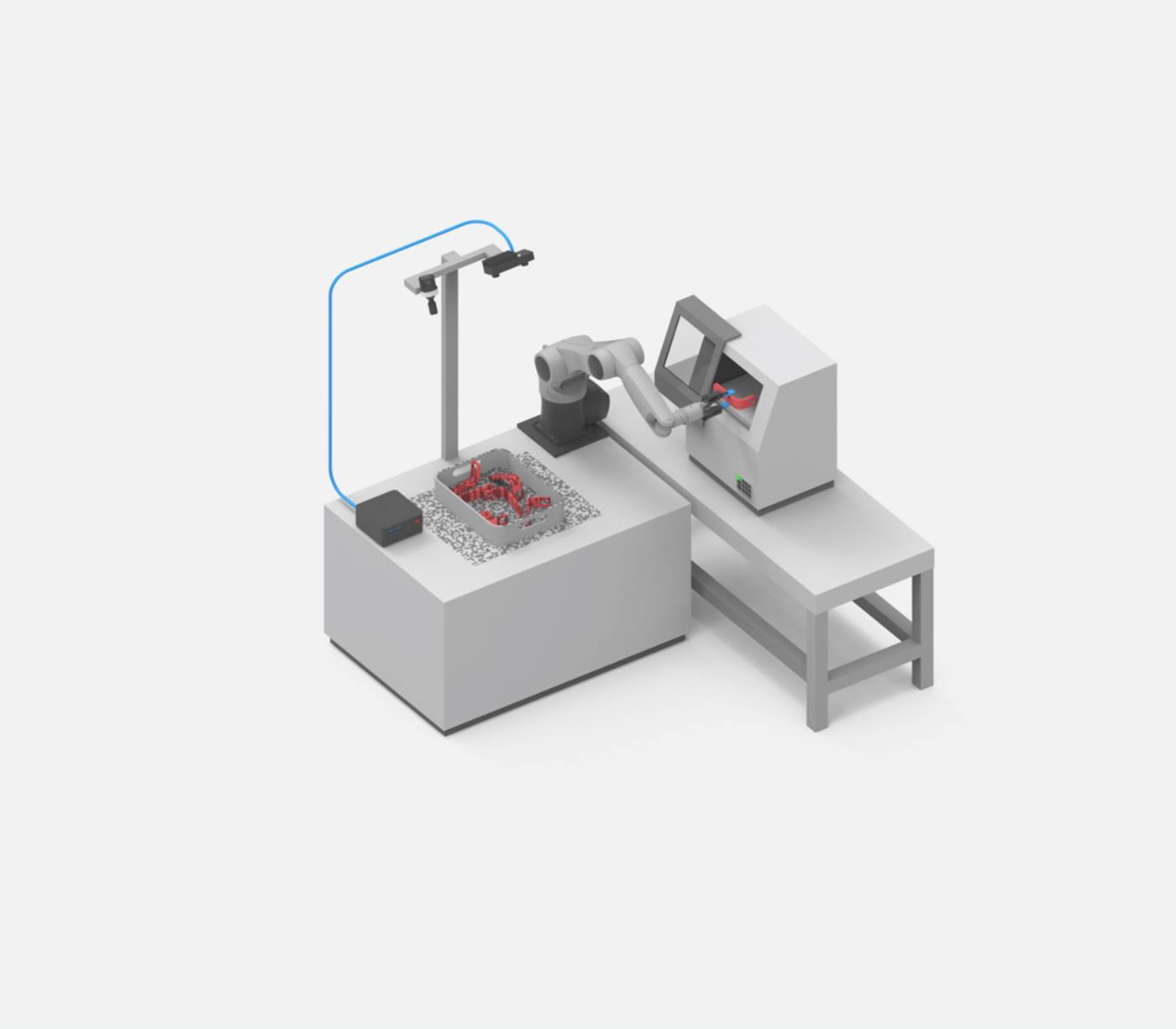
辨識、順序排列、抓取:這就是容器零件抓取的工作原理
可靠地從料盒中抓取零件,而且不會撞到容器:技術套件 KUKA.SmartBinPicking 可以自動實現這樣的任務。這套軟體與 Roboception 的視覺辨識系統結合使用,可實現零碰撞和不會形成奇點的抓取應用,可用於控制例如 KR AGILUS、KR CYBERTECH 或是 KR IONTEC 等六軸機器人從料盒中抓取零件。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

KUKA.SmartBinPicking 軟體完美結合了基於人工智慧的物件辨識功能和精確的機器人軌跡規劃。在高速運作之下,一個動作就能將零件從料盒中取出,而且不會發生碰撞。
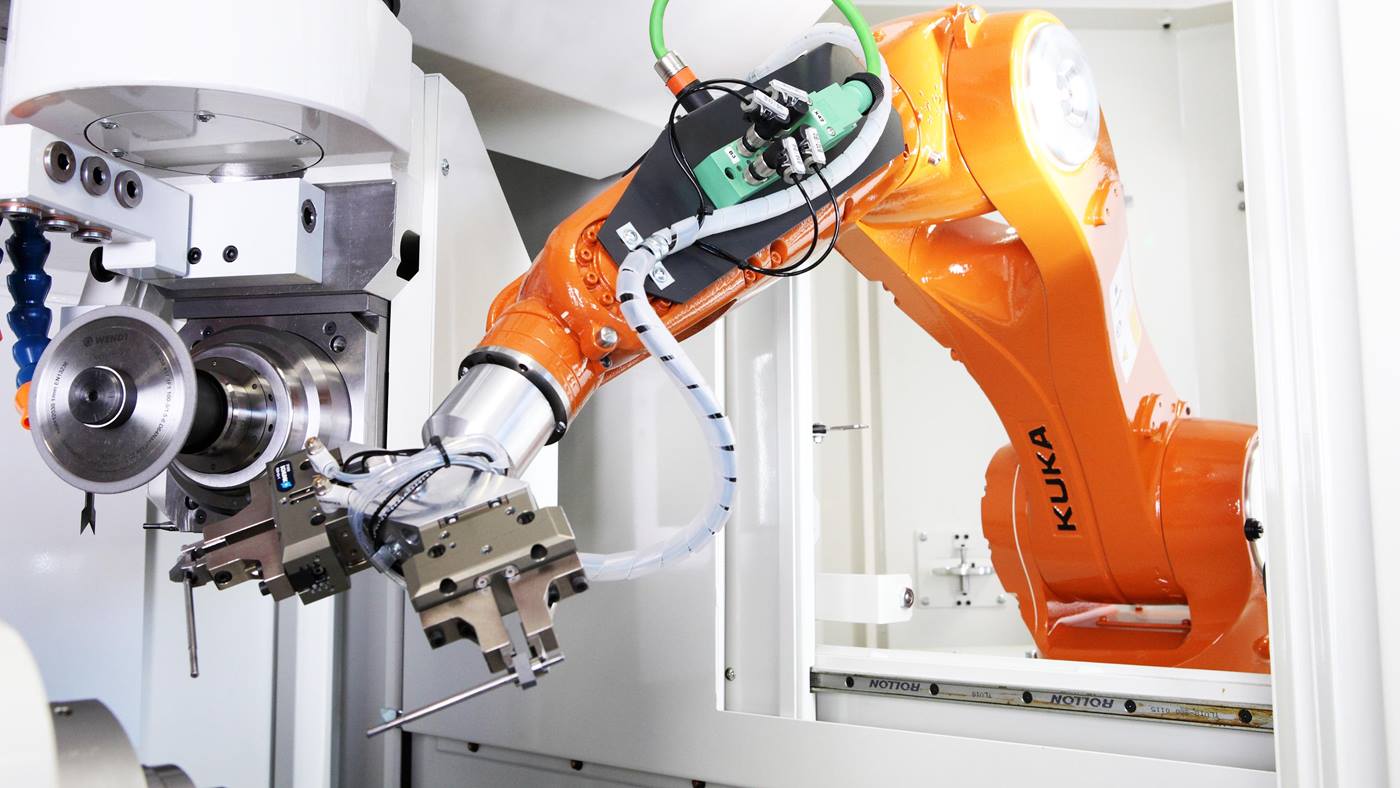
可靠地從料盒中抓取零件,而且不會撞到容器:技術套件 KUKA.SmartBinPicking 可以自動實現這樣的任務。這套軟體與 Roboception 的視覺辨識系統結合使用,可實現零碰撞和不會形成奇點的抓取應用,可用於控制例如 KR AGILUS、KR CYBERTECH 或是 KR IONTEC 等六軸機器人從料盒中抓取零件。
基於人工智慧的組件辨識功能搭配同時進行的精確軌跡規劃,為整合商或最終用戶提供適合工業生產的自動化解決方案: