Rozpoznat, strukturovat, uchopit: Tak funguje bin picking
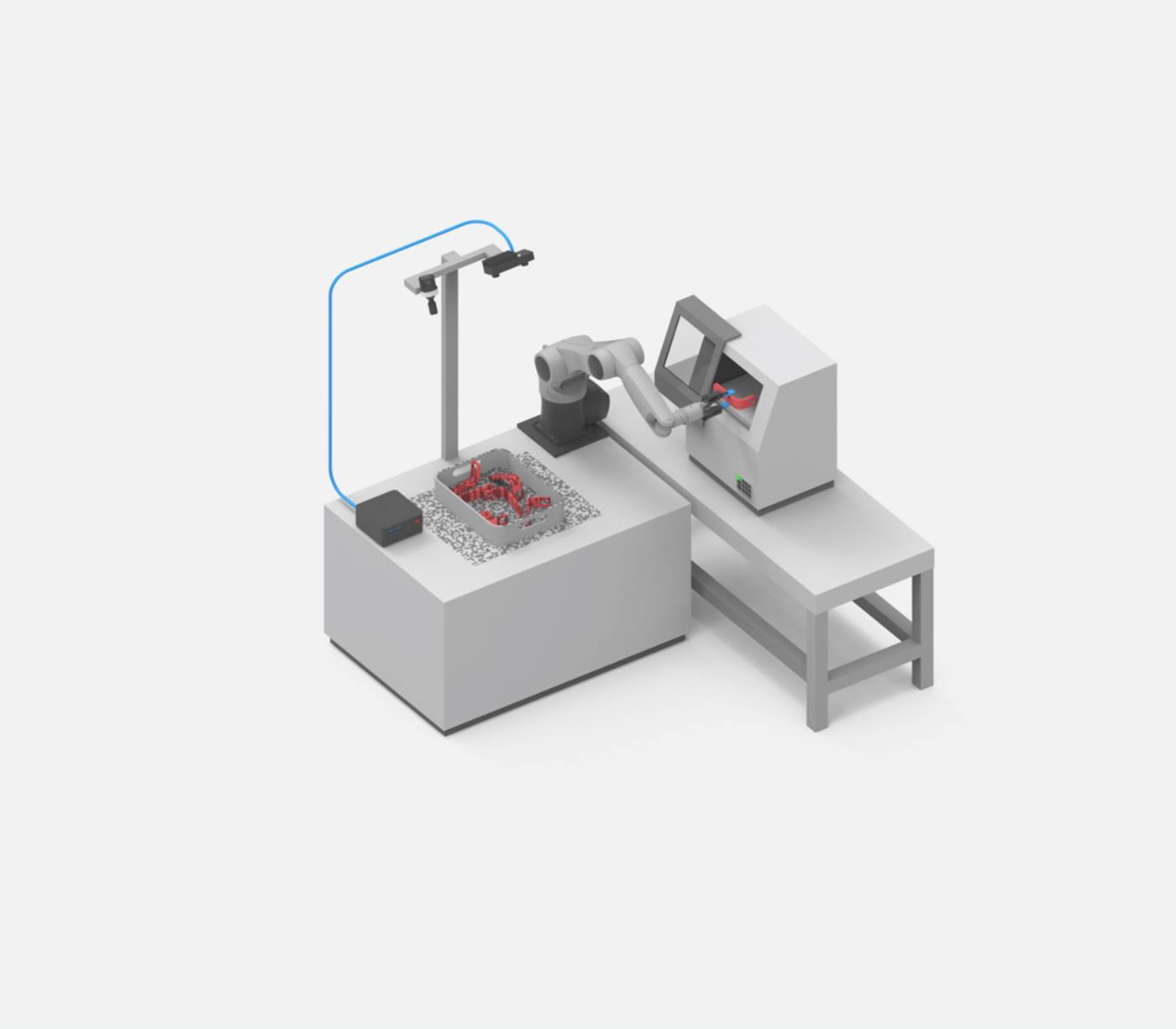
Spolehlivě uchopujte díly z krabice, aniž byste naráželi do kontejneru: S technologickým balíčkem KUKA.SmartBinPicking to lze nyní provést zcela automaticky. Software v kombinaci s rozpoznáním Vision od firmy Roboception umožňuje uchopování dílů z krabice bez kolizí a singularit například šestiosým robotem KR AGILUS, KR CYBERTECH nebo KR IONTEC.
Neuspořádané díly nejsou žádnou výzvou
Náhodně uspořádané předměty jsou rozpoznány a prioritizovány 3D kamerou. To znamená, že: Software strukturalizuje, který díl je nejlepší uchopit a stanoví tak optimální pořadí. Integrované plánování dráhy vypočítává bezkolizní dráhu pro bin picking včetně všech úhlů, za účelem odebírání jednotlivých dílů z krabice. Uchopením pátou osou, tedy zápěstím robota, jsou možné výrazně přesnější úhly.
Volná cesta pro automatizaci a Průmysl 4.0
Zatímco robot odebírá díl z krabice pomocí vysoce přesného úchopu, zároveň se již plánuje další dráha. To zkracuje doby cyklu. Zpracování obrazu 3D kamery a plánování dráhy se provádí na externím průmyslovém PC, na kterém je nainstalován zásuvný modul KUKA. O to se zákazník ovšem nemusí starat, protože získá kompletní softwarový balíček. Pak už platí jen: Volná cesta pro výběr z krabice a inteligentní bin picking.
Jakou roli hraje umělá inteligence při rozpoznávání předmětů?
Aby bylo možné co nejlépe připravit výběr z krabice a inteligentní picking, je k dispozici CAD model ve fotorealistickém simulačním prostředí. Tam se systém školí a obraz se pomocí rozsáhlé knihovny optimalizuje tak, aby vyhovoval všem požadavkům, například s ohledem na barevné reakce a světelné podmínky. Tento automatizovaný proces může běžet přes noc, takže robotická aplikace může být použita další den.