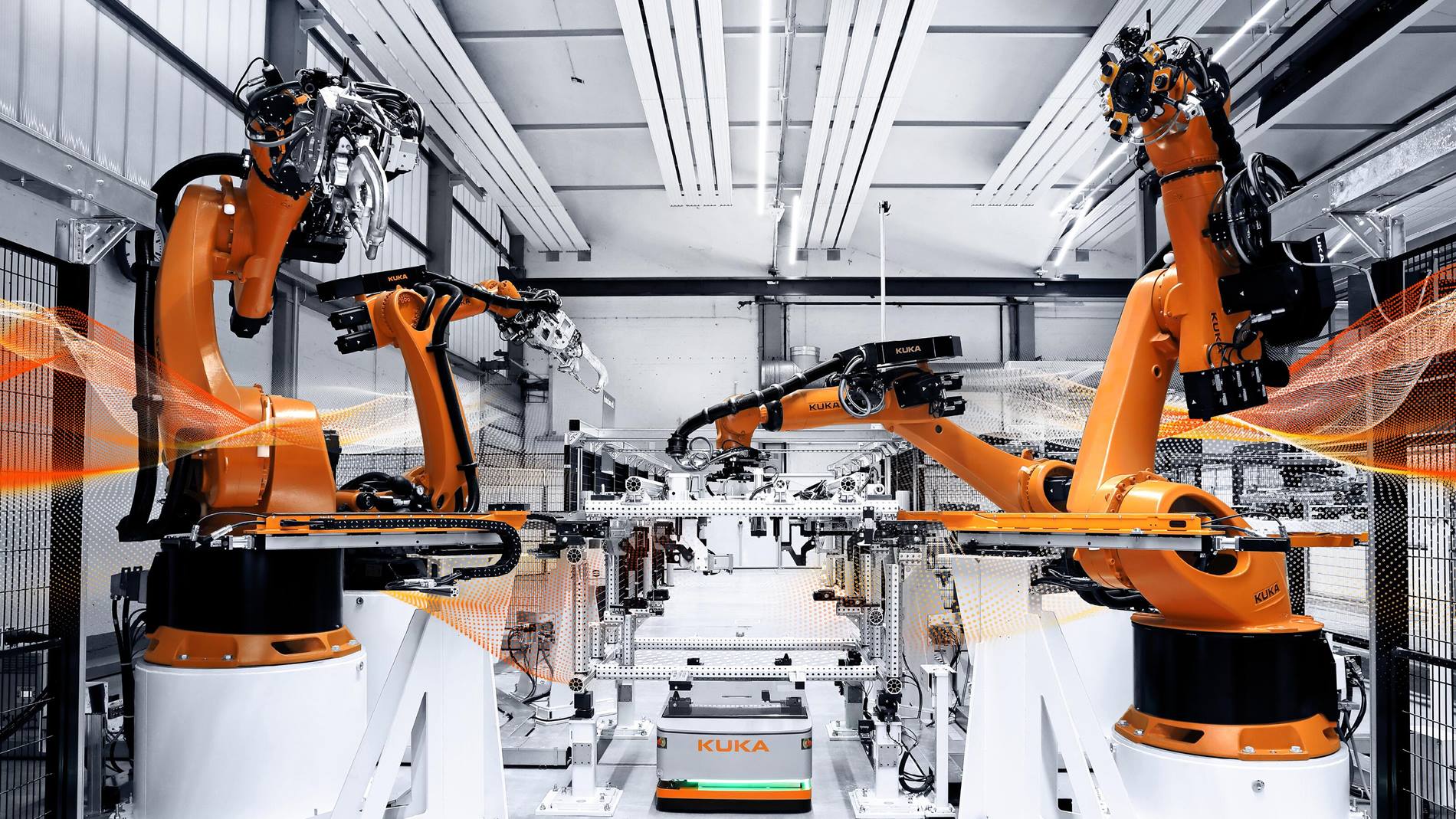
El robot industrial: ¿qué es?
Un robot industrial, según la definición de la Organización Internacional de Normalización, es un sistema controlado automáticamente, multiactivo, versátil y programable que consta de tres o más ejes. Existen dos tipos de robots: Los robots cartesianos y los robots poliarticulados.
Cada robot tiene sus propias características y tecnologías. Las más importantes son el rango de acciones y la capacidad de carga máxima, que establece los límites de la capacidad de la máquina. Estos elementos permiten elegir el
robot industrial más adecuado. Es posible mejorar las prestaciones de un robot con ejes adicionales:
ejes lineales,
posicionadores o desplazarlo con una
plataforma móvil.
Un poco de historia:
El antepasado del robot industrial es el autómata, es decir, un dispositivo accionado por un mecanismo interno que imita los movimientos humanos. Estos autómatas se fueron desarrollando y perfeccionando progresivamente, hasta culminar en 1954 en el Ultimate: el primer brazo robótico articulado, patentado por el fabricante George Devol. Este hecho supuso un antes y un después en la robótica industrial.
Robótica Industrial:
La robótica industrial es una ciencia que se alimenta de la fundamentación teórica y la innovación constante que la impulsa hacia el futuro. Con la llegada de la inteligencia artificial cualquiera de estos desarrollos con capacidades cognitivas que antes eran exclusivas del ser humano, se pueden incorporar en los robots. Los sistemas robóticos no solo ejecutan tareas de manera precisa y repetitiva, sino que también aprenden y se adaptan a situaciones cambiantes, promoviendo un incremento en la producción y transformando radicalmente la industria.
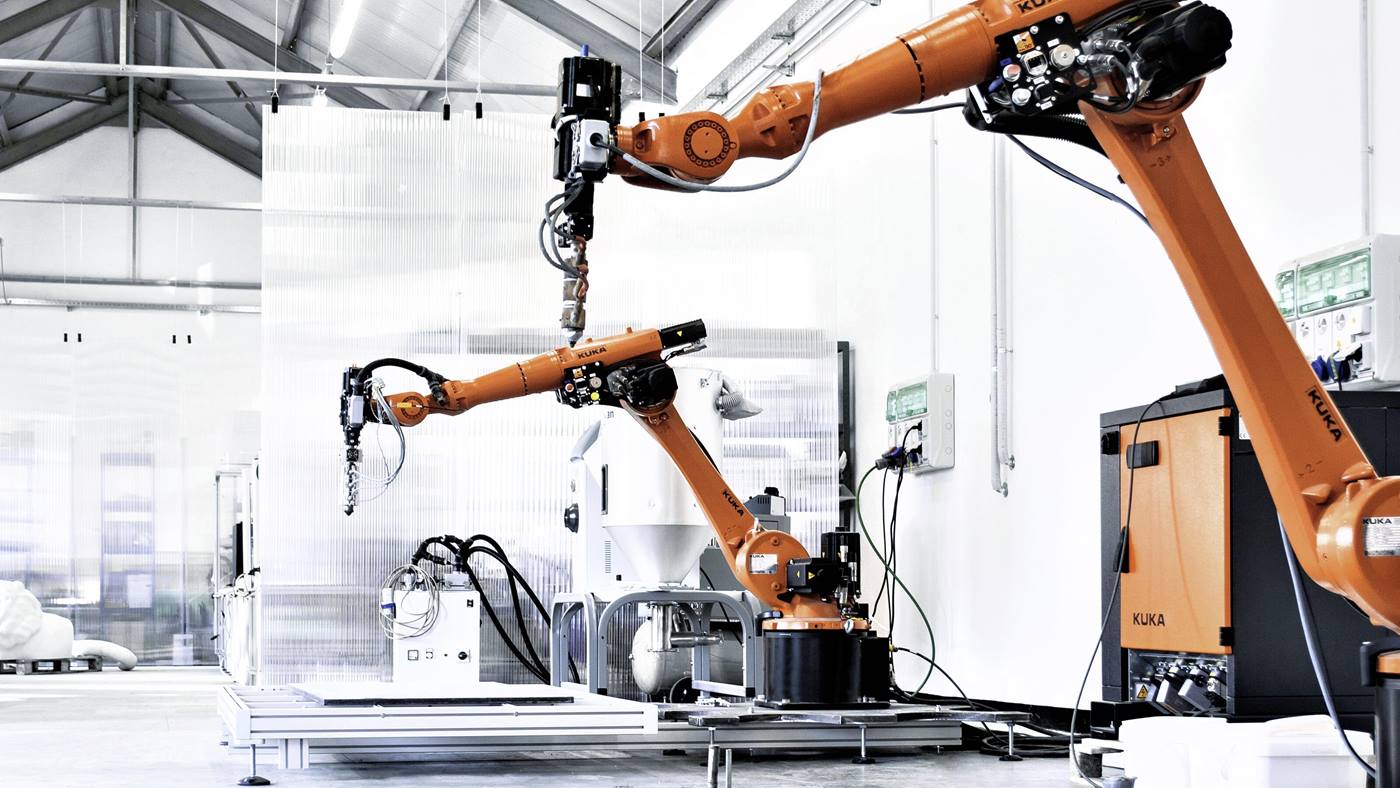
Un sistema robotizado tiene tres componentes principales:
-
Una parte mecánica: el brazo propiamente dicho, compuesto por motores en cada eje.
-
Una parte electrónica: el armario eléctrico con su unidad central que asegura el servocontrol, sus sensores y variadores de velocidad.
-
Una parte informática: en forma de un lenguaje de programación específico que permite controlar la máquina robotizada vinculándola a su usuario y a su entorno. Esta parte informática incluye una calculadora que convierte los datos codificados del motor en valores cartesianos.
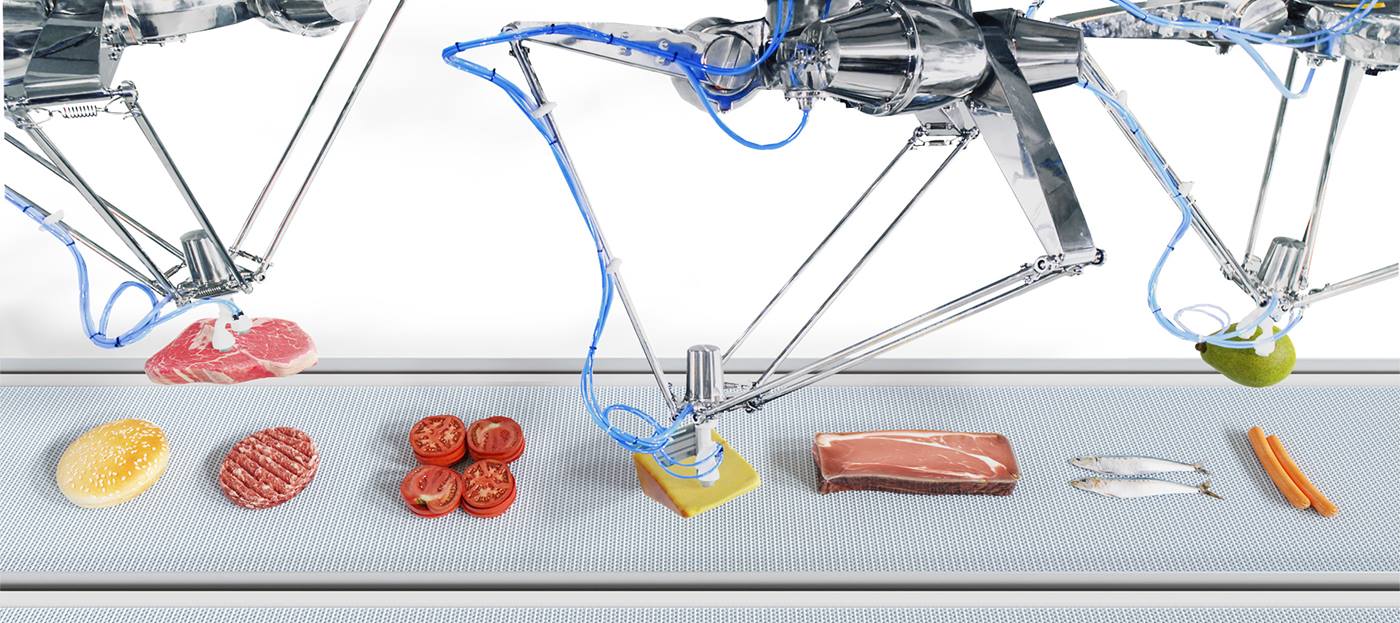
¿Para qué sirve un robot industrial?
Las aplicaciones en robótica se utilizan como herramienta principal en muchas industrias e ingenierías, como la automovilística, la alimentaria, la electrónica, la metalúrgica, la fabricación de plásticos, pero también en el sector médico. El brazo robótico se adapta a numerosas aplicaciones industriales en función de sus características esenciales y de la herramienta de que disponga. Las principales aplicaciones son:
Ventajas de uso
Los robots industriales aportan una velocidad de ejecución en un entorno de fabricación superior a la humana y una precisión duradera en el tiempo. Teniendo en cuenta sus altos niveles de precisión, los robots industriales son capaces de producir con alta calidad y ejecutar procesos más precisos y fiables. Una alta calidad del producto se traduce en una disminución del tiempo empleado en las comprobaciones de control de calidad para determinar si los productos cumplen los estándares deseados.
Así pues, el uso de la tecnología de automatización tiene muchas ventajas:
-
Mejora del producto
-
Aumento de la productividad
-
Optimización de la calidad
-
Precisión casi perfecta y repetible
-
Reducción de los riesgos para los empleados
-
Mejora de las condiciones de trabajo: menos RSI
-
Certeza de la consistencia de la tasa y el proceso
-
Mayor flexibilidad
¿Cómo elegir el mejor sistema robotizado?
El mejor robot será el que mejor responda a las necesidades específicas de un proyecto de fabricación. Para ello, es importante conocer algunos criterios clave, ya que existen distintos tipos de robots:
A la hora de integrar un robot industrial, ya sea clásico o colaborativo, la seguridad es una necesidad, por lo que es esencial realizar previamente un análisis de riesgos para obtener la inforamción. Especialmente los cobots, que trabajan en el mismo entorno que los humanos para combinar las capacidades humanas con la eficacia de las máquinas, requieren muchas precauciones de seguridad. Una vez que tenga estos elementos en mente, puede llevar a cabo una investigación o utilizar esta herramienta que calculará el autómata industrial más adecuado para sus necesidades.
Encuentre el robot industrial más adecuado para su proyecto. Consulte con nuestros expertos en automatización cual es el mejor robot y sistema industrial para su fábrica del futuro. Será importante saber que necesidad tiene nuestro proceso a automatizar, que capacidad de carga, carga útil y alcance necesita el robot para que pueda soportar la carga del producto y pueda completar con facilidad el tiempos de ciclo. Proporcionamos información y soluciones a todas las industrias y sectores.
En resumen, no existe el mejor robot, pero sí brazos robóticos para todas las situaciones y aplicaciones.