Detección, estructuración, agarre: así funciona Bin Picking
Agarrar piezas de una caja de manera fiable sin golpear el recipiente: Con el paquete de tecnología KUKA.SmartBinPicking, esto es ahora posible de forma automatizada. El software, combinado con la detección de visión de Roboception, permite el agarre sin colisiones y sin singularidades de componentes de una caja, por ejemplo mediante un robot de seis ejes KR AGILUS,KR CYBERTECH o KR IONTEC.
Componentes desordenados sin problemas
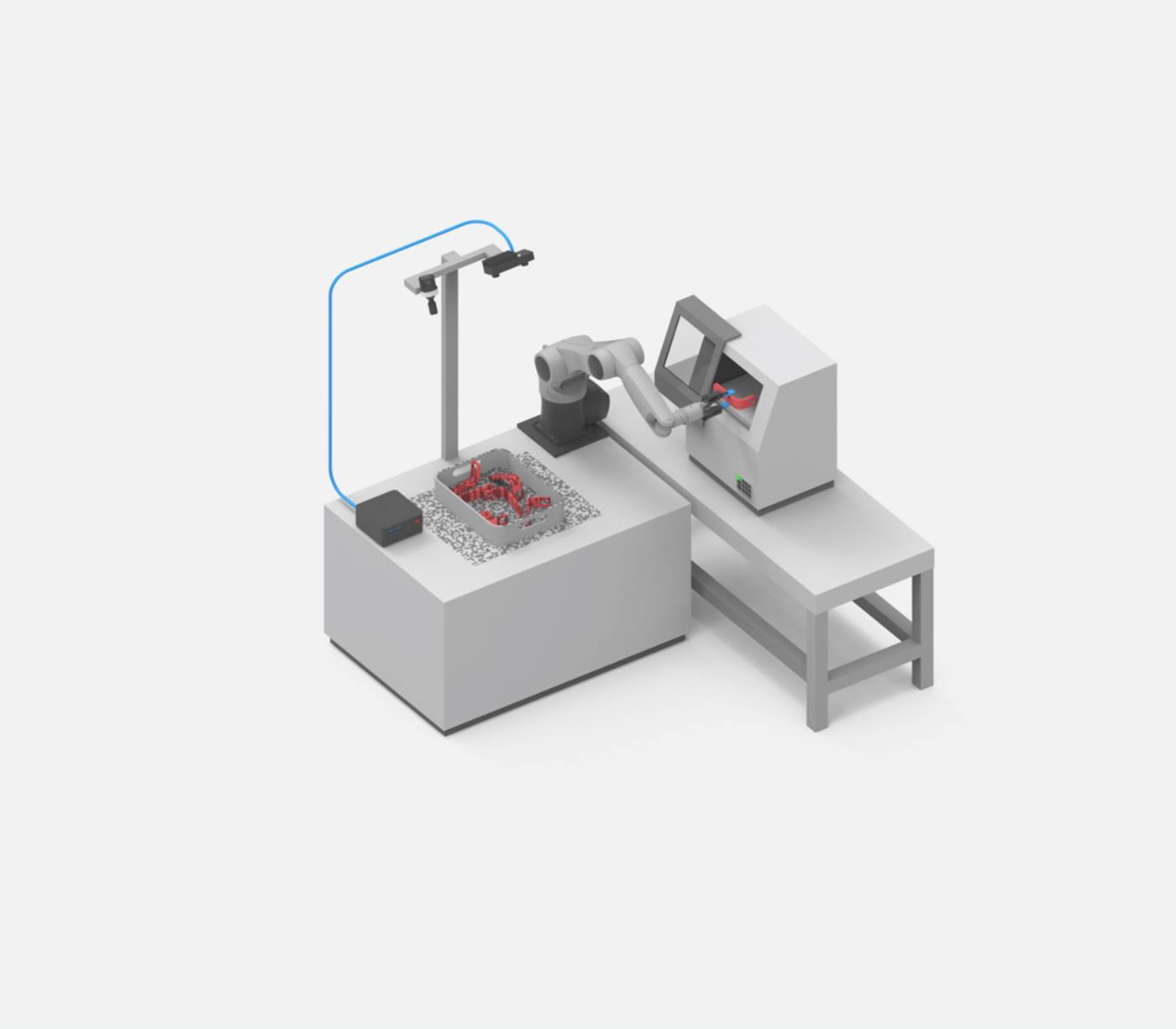
La cámara 3D detecta y prioriza los objetos dispuestos al azar. Esto significa: El software estructura qué componente se debe agarrar mejor y, de este modo, se determina un orden óptimo. La planificación integrada de la trayectoria calcula el recorrido sin colisiones para el Bin Picking junto con todos los ángulos para agarrar la pieza de la caja. Gracias al agarre con el quinto eje, es decir, la muñeca del robot, los ángulos pueden ser mucho más precisos.
Trayectoria libre para la automatización e Industria 4.0
Mientras que el robot con una garra de alta precisión recoge una pieza de la caja, paralelamente se planifica la siguiente trayectoria. Esto reduce los tiempos de ciclo. El procesamiento de imágenes de la cámara 3D y la planificación de la trayectoria se realizan en un PC industrial externo en el que está instalado un plug-in de KUKA. Sin embargo, el cliente no tiene que preocuparse por ello, ya que recibe un paquete de software terminado. Entonces: Trayectoria libre para el agarre en la caja y Bin Picking inteligente.
¿Qué papel juega la inteligencia artificial en la detección de objetos?
Para preparar el agarre en la caja y el picking inteligente de la forma más adecuada posible, se carga un modelo CAD en un entorno de simulación fotorrealista. Allí, el sistema es entrenado y la imagen se optimiza para todos los requisitos mediante una amplia biblioteca, por ejemplo, en lo que respecta a las reacciones en color y las condiciones de iluminación. Este procedimiento automatizado puede ejecutarse durante la noche, de modo que la aplicación robótica se pueda utilizar el día siguiente.