Domaines d’application du logiciel
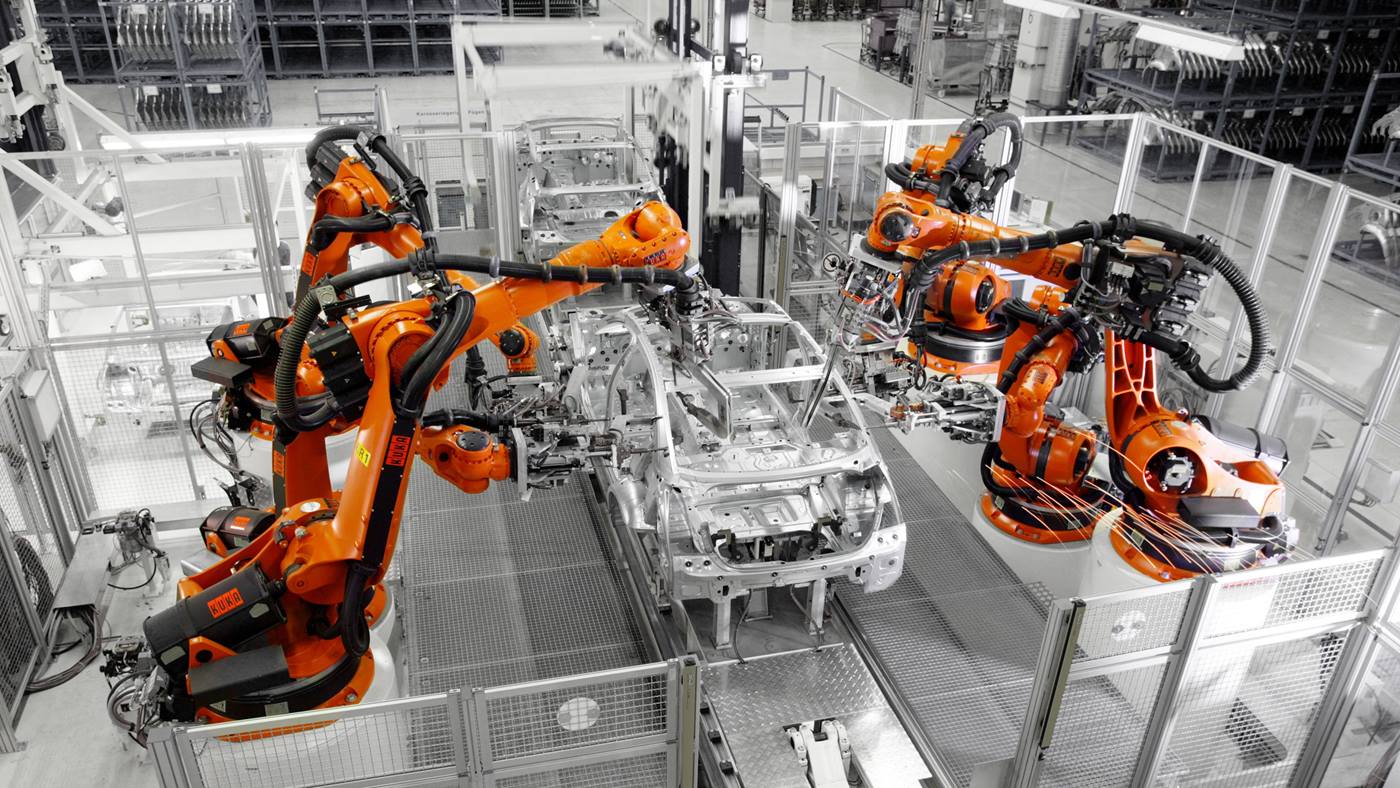
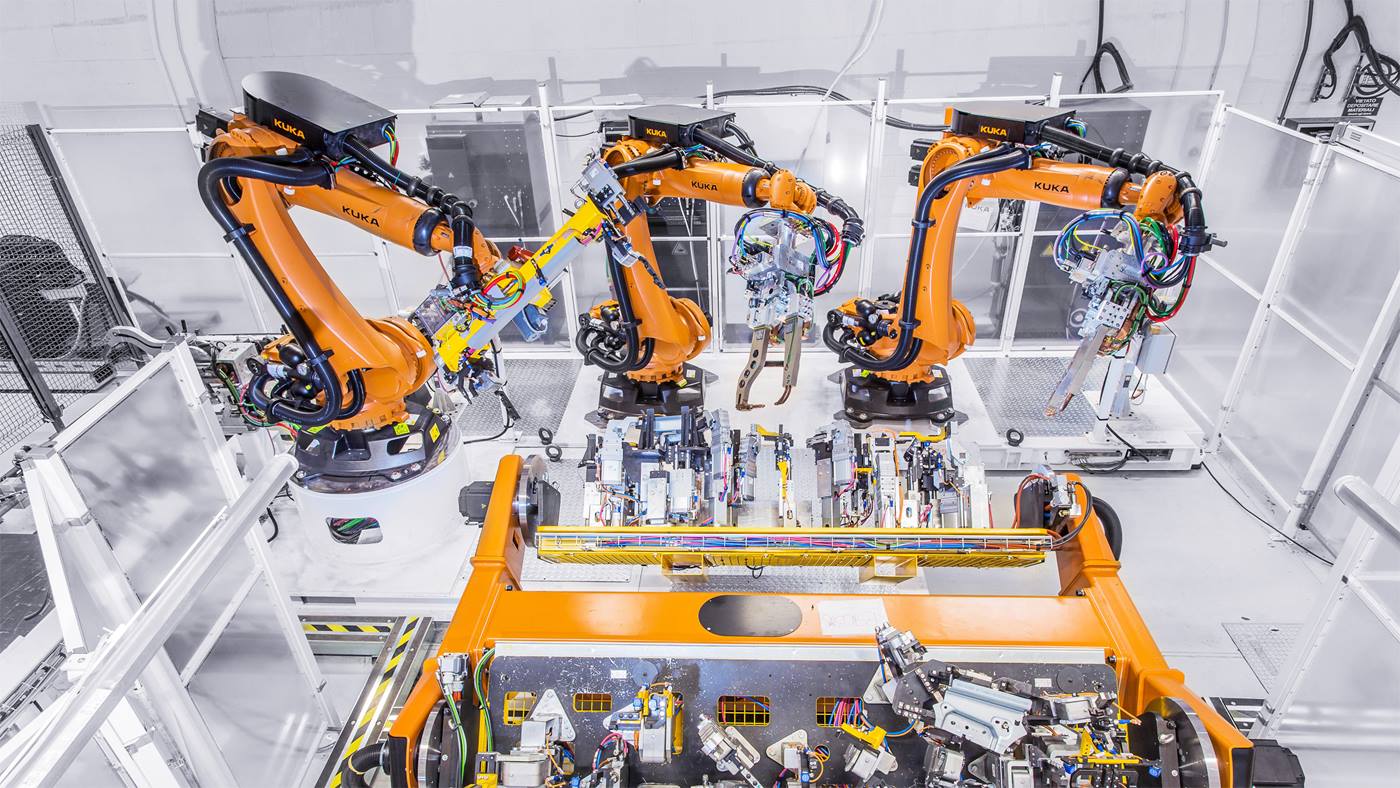
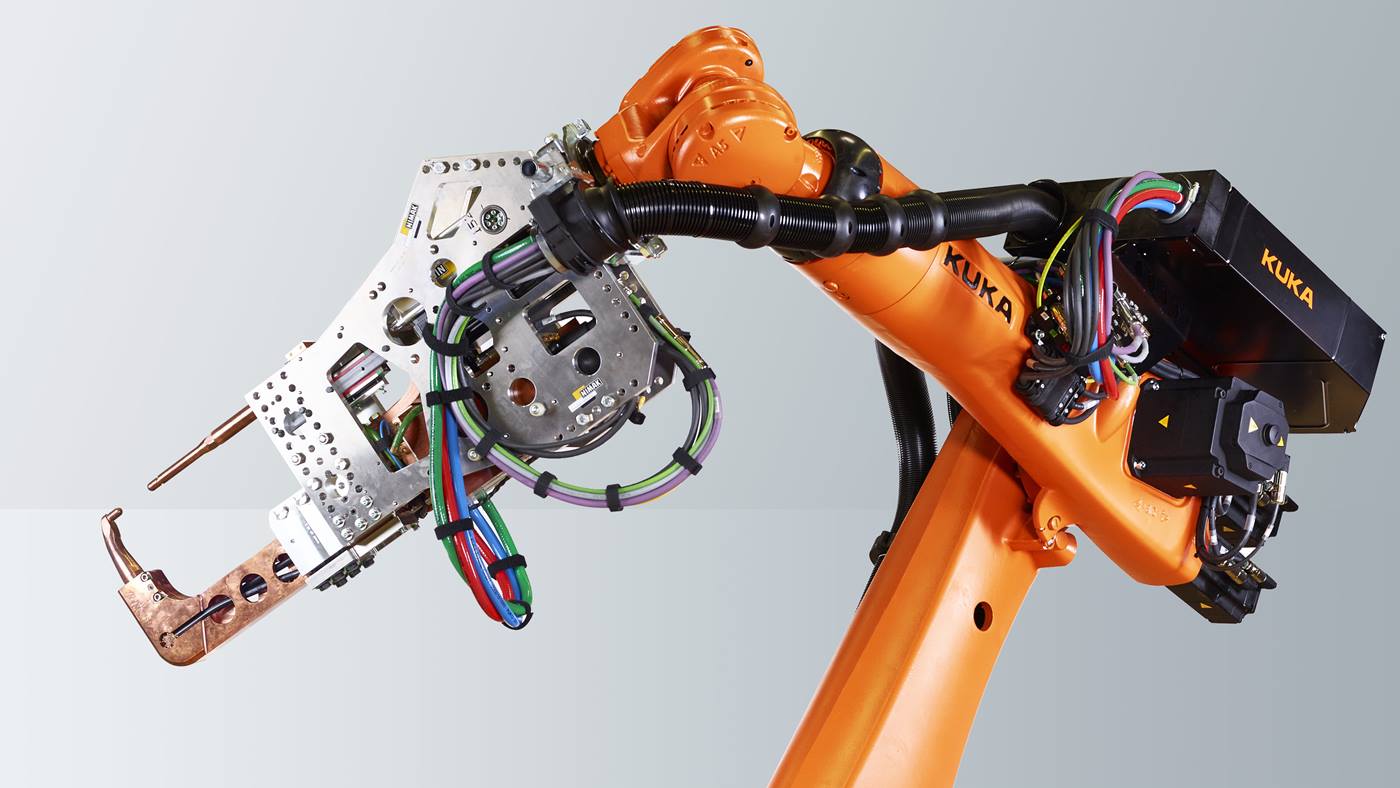
Avec KUKA.Gripper&SpotTech 4.0, le système de robot peut commander et surveiller des outils et des préhenseurs situés dans son environnement de travail. Les domaines d’application concrets sont la manipulation de matériel et le soudage par points avec des pinces à souder pneumatiques. Les tâches de manipulation avec le robot KUKA sont particulièrement rapides et faciles à programmer.
Fonctions de KUKA.Gripper&SpotTech 4.0
- 16 préhenseurs pouvant être configurés librement
- 256 programmes de soudage pouvant être configurés
- Surveillance de façon statique et dynamique de préhenseur
- Symboles de préhenseur pouvant être définis de façon illimitée par l’utilisateur
- Routines d’élimination de défauts librement programmables
- Interface utilisateur graphique avec voyants de contrôle, affichage de l’état et adaptation en ligne
- Adaptation avec WorkVisual 4.0 et sur le smartPAD pour les éléments importants pour la production
Conditions requises par le système pour Gripper&SpotTech 4.0
KUKA.GripperSpotTech 4.0 est un produit succédant à GripperSpotTech 3.x et offre nettement plus de fonctions. C'est la raison pour laquelle il n’est pas compatible avec les versions précédentes.