používate yastaralú verziu prehliadačaInternet Explorer. prosím zaktualizujte prehliadač na novšiu verziu
Selektívne spájkovanie konštrukčných dielov pomocou robota KUKA KR AGILUS
Pri riadiacom systéme ALNEA-ZEUS podporuje precíznosť robota výrobu s nulovou chybovosťou.
Skrátenie výrobného času o 50 percent
Spoločnosť ALNEA Sp. z.o.o. s kmeňovým sídlom vo Varšave ponúka svojim zákazníkom individuálny vývoj a výrobu mechanických, elektrických alebo pneumatických, polo- alebo plnoautomatických testovacích prístrojov. Poľský podnik sa pritom špecializoval na proces selektívneho spájkovania. Riadenie ALNEA-ZEUS vyvinuté pred rokmi spoločnosťou ALNEA však muselo byť podrobené obnove, aby aj v budúcnosti mohlo garantovať štandardy požadované medzinárodným odborným zväzom odvetvia na výrobu dosiek plošných spojov a elektrotechniky (IPC).
Nová verzia riadiaceho prístroja spájkovania by mala mať prístup ku všetkým procesným parametrom, ako napr. príprava relevantných materiálov pre proces spájkovania, ich exaktné polohovanie alebo zabránenie kvapkám zo spájkovania mimo pracovnej oblasti. Spoločnosť ALNEA realizovala nový vývoj v úzkej spolupráci so spoločnosťou KUKA Roboter v Augsburgu. Vďaka robotovi KUKA KR AGILUS sa mohla značne zlepšiť presnosť procesu spájkovania, eliminovať zdroje chýb a skrátiť výrobný čas o 50 percent.
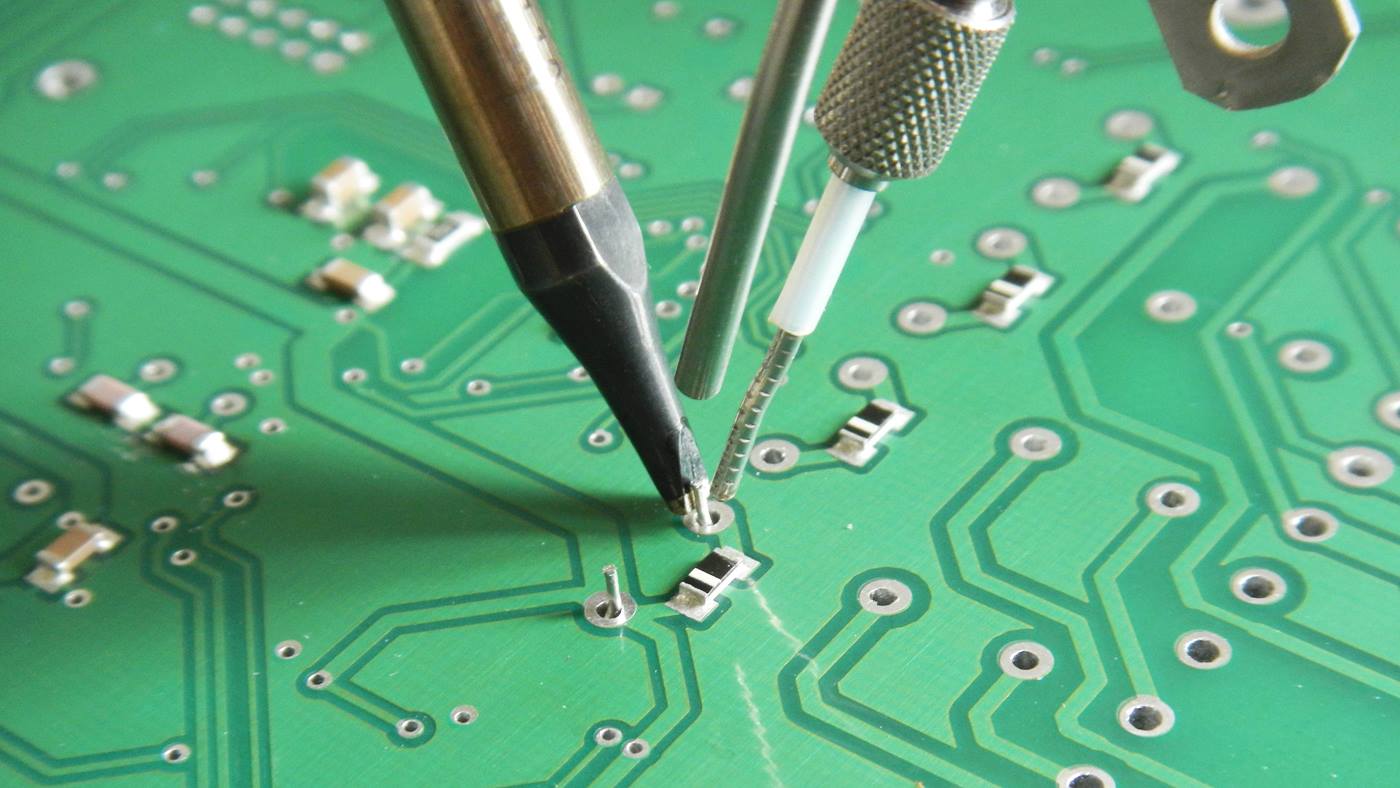
Spájkovacia technika takzvanej Trough-Hole-Technology (THT) si vyžaduje maximálnu mieru presnosti. Variabilné parametre ako množstvo taviva, doba a teplota predohrevu, doba nanášania alebo teplota spájkovania majú rozhodujúci vplyv na kvalitu. Okrem toho sa musia zohľadniť vplyvy podmienené materiálom. Malé konštrukcie a krátke vzdialenosti od konštrukčných dielov, ktoré sa nesmú pokryť spájkou, nedovoľujú žiadne chyby. Opravné procesy sú pri THT náročné na čas a náklady a často nie sú reprodukovateľné, povolené len čiastočne alebo dokonca úplne zakázané.
Cieľom odvetvia elektroniky je preto proces s nulovou chybovosťou. „Spoľahlivo kontrolovaný proces je pritom rozhodujúcim, prvým krokom smerom k výrobe s nulovou chybovosťou u nášho zákazníka“, tvrdí Krzysztof Kamiński, prezident spoločnosti ALNEA Sp. Z.o.o.
Zabraňovanie chybám pomocou monitorovania procesu a korekcie
Podstatnou príčinou chýb v selektívnom procese sú spájkovacie mostíky, ktoré napríklad vznikajú pri bezolovnatom spájkovaní z dôvodu nižšej hmotnosti spájkovacej zliatiny, alebo nedostatočné nanášanie taviva. Všetky s tým spojené procesné kroky by mali byť preto spoľahlivo monitorované. Nesprávne alebo nepresne umiestnené konštrukčné skupiny môžu v procese selektívneho spájkovania taktiež viesť k problémom. Rozhodujúce je aj monitorovanie ich polohy a jej prípadná korekcia.
Presnosť potrebnú pre tento proces spájkovania môže garantovať len moderný robot
Okrem ďalšieho vývoja riadenia bolo pre spoločnosť ALNEA preto nutné nainštalovať robota, ktorý vykoná proces spájkovania a presne umiestni komponenty. Pri hľadaní vhodného modelu sa spoločnosť ALNEA rozhodla pre spoluprácu s KUKA. „Smerodajný bol pre nás vyhovujúci pomer cena/výkon a vynikajúca technická podpora tímu KUKA“, vysvetľuje.
Riadenie KR C4 od spoločnosti KUKA okrem toho splnilo požiadavku spoločnosti ALNEA, že sa kontrola procesu musí uskutočňovať pomocou jednoduchého ovládacieho prístroja. Pretože jeho otvorená architektúra podporuje bezproblémovú technickú integráciu do existujúceho strojového prostredia.
Malý, rýchly a precízny: KUKA KR 6 R900
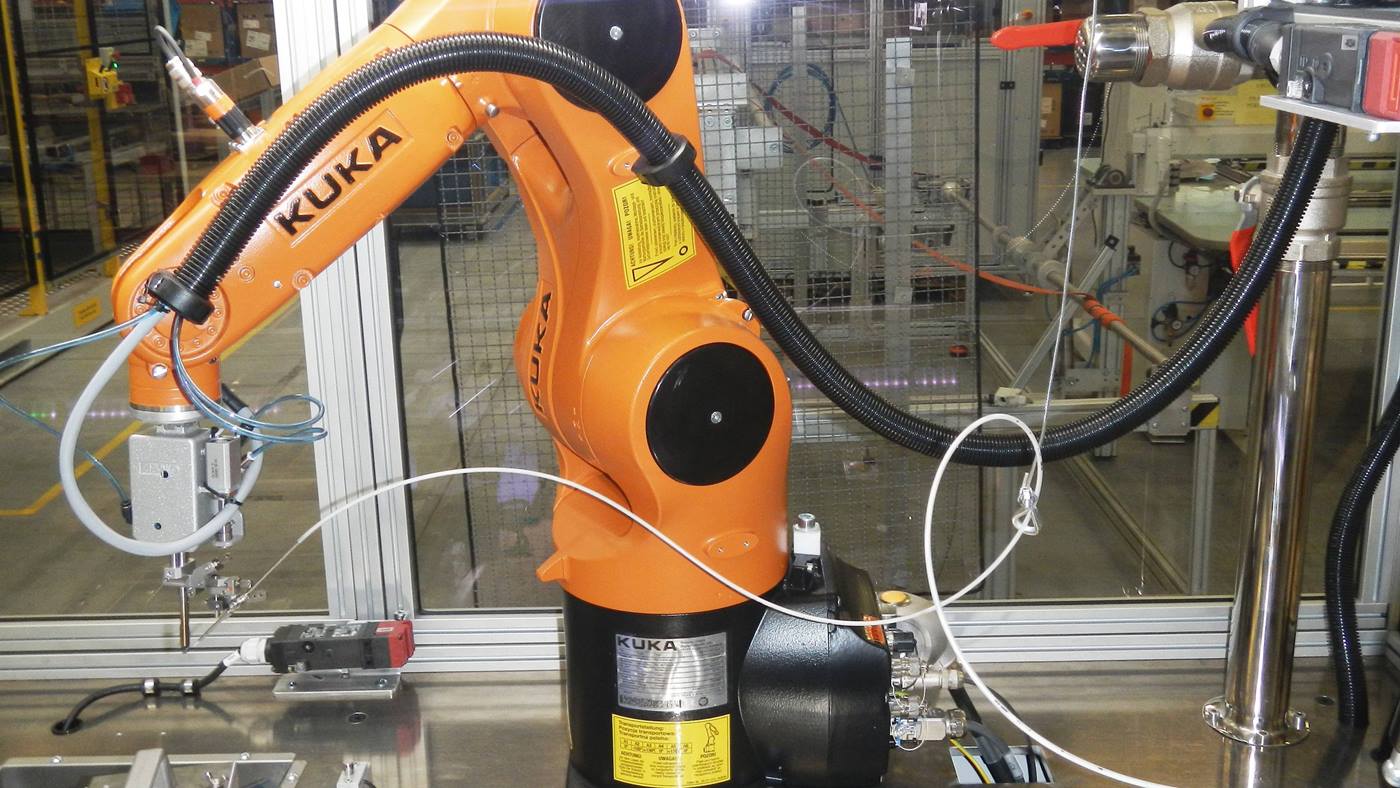
Spoločnosť ALNEA sa rozhodla pre KR 6 R900 zo série KR AGILUS ako prototyp. Séria presviedča vďaka extrémnym rýchlostiam pri súčasne vysokej presnosti opakovania a precíznosti. Vďaka symetrickej konštrukcii roboty KR AGILUS optimálne využívajú pracovný rozsah. Ich extrémne štíhle tvary pre nasadenie v zúžených priestoroch vytvorila vďaka prívodu energie vnútri.
KR 6 R900 nezaručuje len maximálnu presnosť a pracovnú rýchlosť pri priestorovo úspornej konštrukcii. So zaťažením až do 6 kg a maximálnym dosahom 900 mm ponúka robot okrem toho presnosť opakovania menej ako ±0,03 mm a je tak ideálne vhodný pre požiadavky procesu spájkovania. V zásade je možné popri KR 6 R900 skombinovať tiež iné modely robotov KUKA s novým riadiacim systémom ALNEA-ZEUS.
Spájkovacia jednotka s KR 6 R900.
Príkazy priamo prostredníctvom ovládacieho prístroja
„Pri integrácii riešenia automatizácie na báze robotov sa musela navzájom optimálne odladiť komunikácia medzi riadiacou jednotkou spájkovacieho prípravku a riadiacou jednotkou robota“, vysvetľuje výzvu Kamiński. Nato bol takpovediac nahraný do pamäte robota softvérový balík na kontrolu parametrov procesu selektívneho spájkovania. Zákazníci spoločnosti ALNEA môžu tak prostredníctvom ovládacieho prístroja KUKA smartPAD ovládať robota priamo vo výrobnom procese.
Prostredníctvom ethernetovej komunikácie sú príkazy prenášané na ovládací prístroj ALNEA-ZEUS. Kontrolný prístroj potom vykoná príkaz na základe špecifického hardvéru a softvéru príslušného zákazníka. Riešenie si vystačí bez PLC alebo HMI panela a ani nepotrebuje žiadne dodatočné rozhrania.
Výsledok: O 50 percent kratšia procesná doba pri súčasnej minimalizácii chýb
KUKA KR 6 R900 precízne spĺňa zverené úlohy v procese selektívneho spájkovania: Na jednej strane riadi pohyby spájkovacieho piesta, na druhej strane pevne drží dosku v zafixovanej polohe. Vďaka riešeniu automatizácie na báze robotov vyvinutému spoločnosťou ALNEA sa môžu dnes všetky parametre procesu selektívneho spájkovania spoľahlivo monitorovať pomocou ovládacieho prístroja. Okrem toho sa do systému napoja a využijú všetky dáta. ktoré dodáva robot KUKA.
K tomu patrí okrem iného monitorovanie prívodu komponentov a ich polohovanie ako aj ovládanie ďalšieho externého vybavenia. Toto prispelo nielen k citeľnej minimalizácii chýb, ale aj k značnému zvýšeniu produktivity. „Procesnú dobu sme pomocou nového riešenia skrátili o 50 percent“, zdôraznil Kamiński.
Vďaka monitorovaniu procesu pomocou ovládacieho prístroja je v neposlednom rade prehliadnuteľná potreba školenia pracovníkov zákazníkov. Teraz sa už nemusia nasadzovať tri rôzne osoby: špecialisti na proces, roboty a riadenia. Po krátkom školení dokáže aj robotník riadiť proces a spájkovacieho robota.
Robot drží dosku na mieste ha ovláda pohyb spájkovacieho piesta.