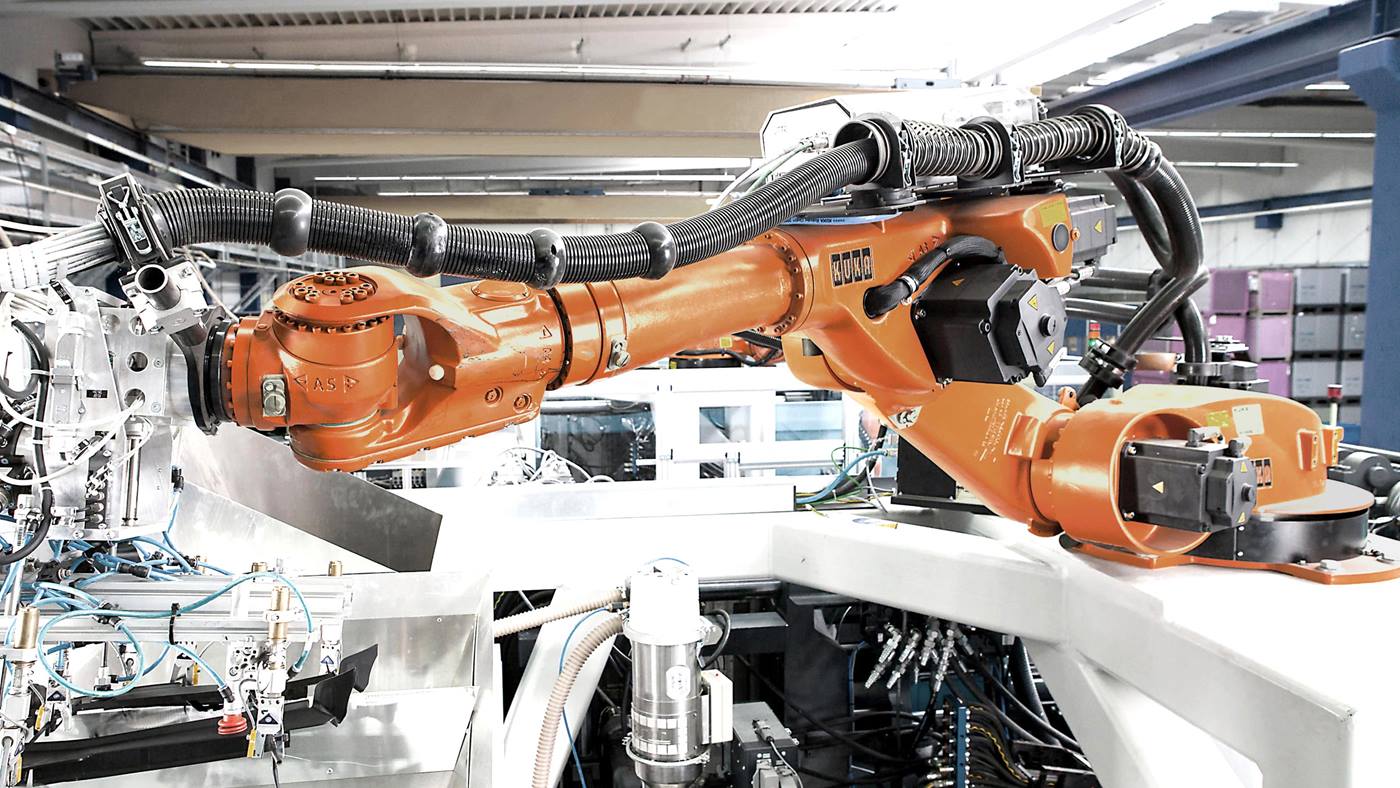
KUKA robots in the plastics industry
KUKA provides a wide range of robots specifically designed for operation in the plastics industry. They are primarily characterized by four properties that are essential in this industry:
- Lightweight:
KUKA shelf-mounted robots stand out for their low weight and small volume. They can be installed directly on machines with minimum effort, thereby saving space. - Fast:
Thanks to their low moving mass, KUKA shelf-mounted robots achieve a high dynamic performance and very short cycle times. This enables higher productivity and cost-effectiveness with rapid payback. - Reliable planning:
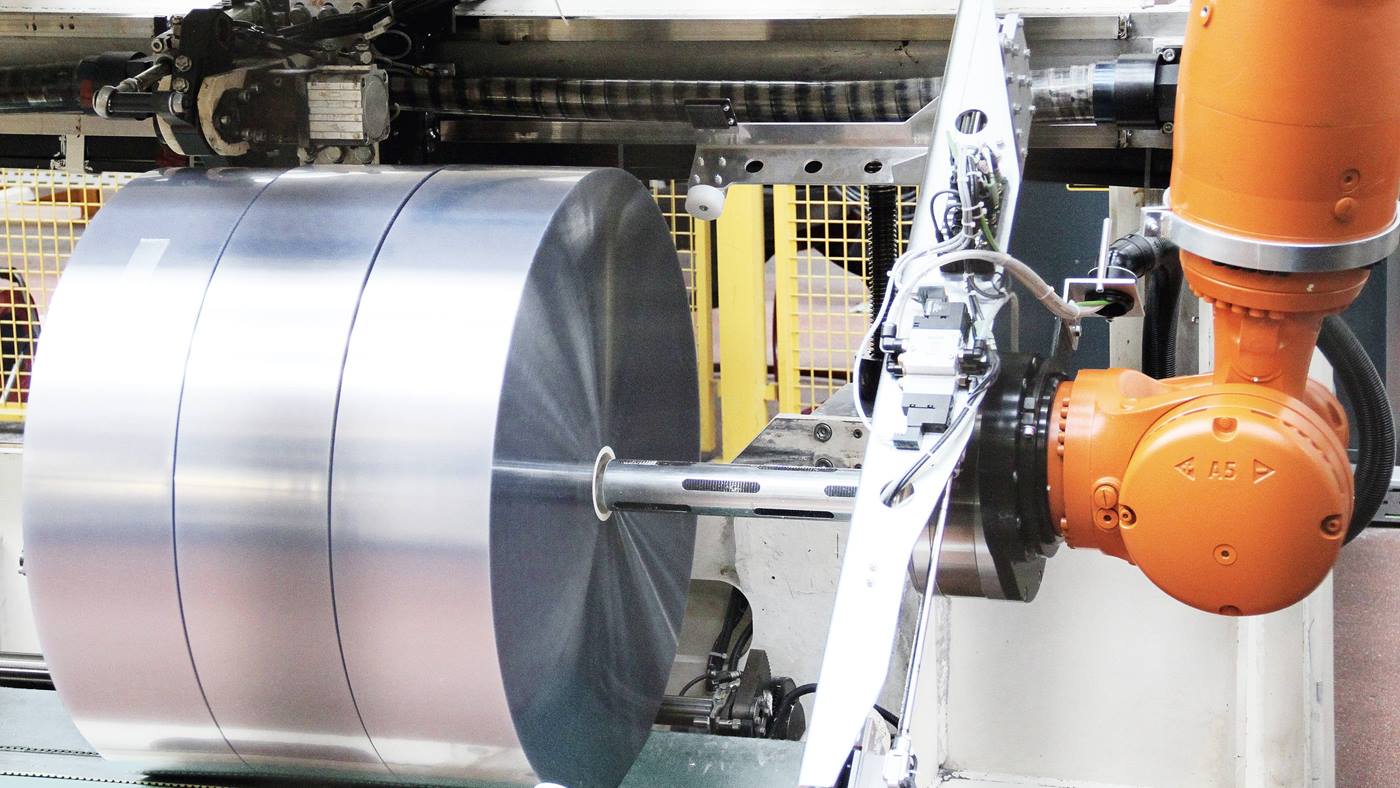
KUKA robot families have an identical mounting base hole pattern. This allows different KUKA shelf-mounted robots to be used on machines of different sizes without any additional planning measures. - Deep reach:
KUKA shelf-mounted robots are designed for an especially large downward reach. They optimally access the workspace from above. Thanks to their low height, they require little vertical space.
Find out how especially medium-sized companies in the plastics processing industry remain competitive through automation and digitization of the manufacturing process – whether it's handling, loading and unloading of injection molding machines or machining components.
Mastering automation easily and safely
Intelligent robotics from KUKA also means that the integration, programming and control of the technology are kept as simple as possible. Operation using KUKA.PLC mxAutomation is considered to be a real game-changer. It enables safe and error-free work with automation solutions using a sophisticated concept that requires no extensive training or in-depth specialist knowledge.
Familiar interface for fast programming
KUKA robots perform processing tasks like plastics machines – and can be programmed like them in G-code (DIN 66025) thanks to the KUKA.CNC interface. Users understand it immediately. They can create programs using a CAD/CAM process chain and, after simulation, execute them on the robot without having to compile them into the robot language. Tool radius correction, sister tools and many other familiar CNC functions are already included.