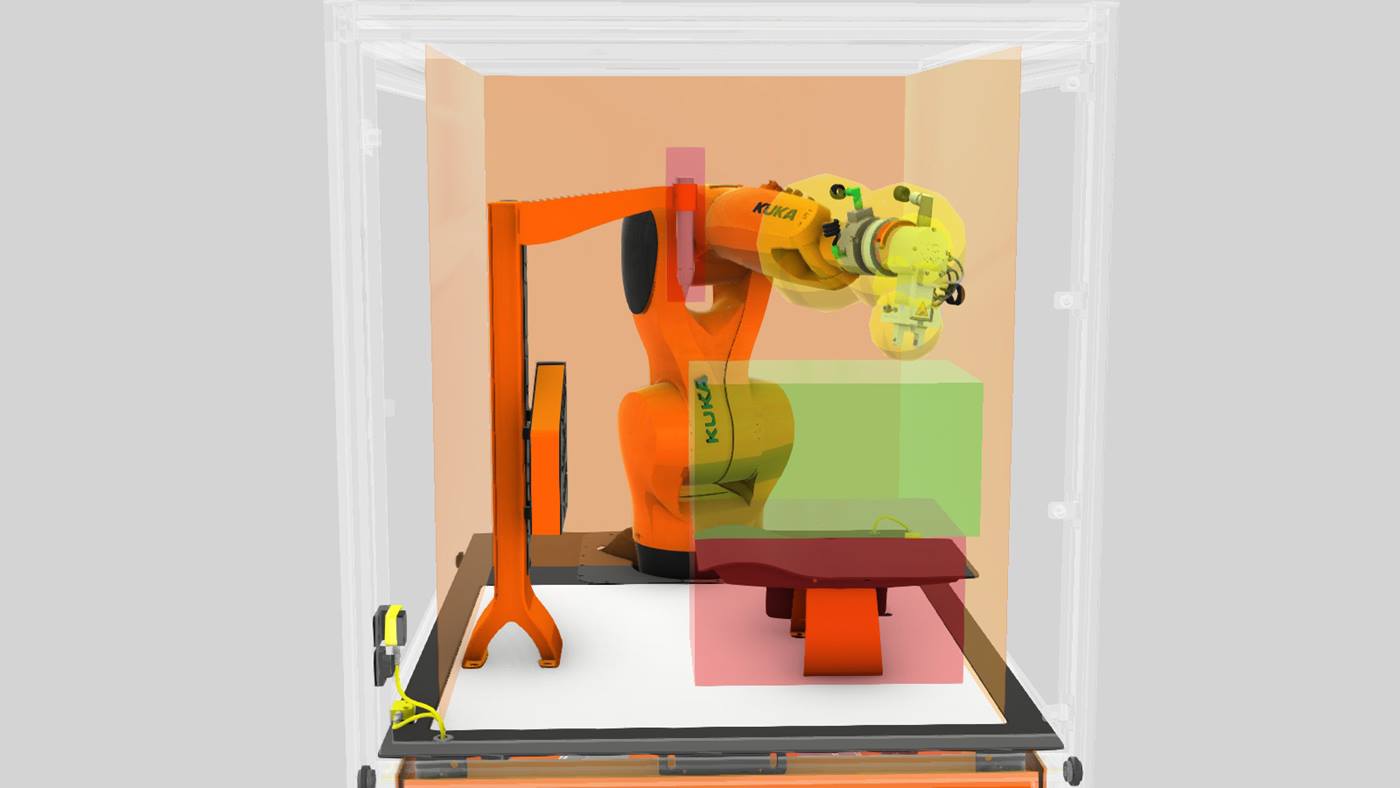
KUKA.SafeOperationでの監視領域
その中心にあるのは安全性です。このソフトウェアは、理論的な作業領域を安全に減らすために最大16の監視領域と固定セル領域を提供します。この監視領域の定義によってロボットの挙動が決定されます。
どの領域も個別に指定できます。デカルト定義あるいは軸特有の定義のどちらかを選択します。さらに次の領域の種類を区別できます:
- 作業領域
- 保護領域
- 通知保護領域(停止しない)
- 通知作業領域(停止しない)
- セル領域(切替え不可)
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください

KUKA.SafeOperationソフトウェアによって、設備の必要スペースを減らし、素早く安全に、そしてコンパクトに生産できます。このソフトウェアは、セル設定のオプションやヒューマン・ロボット・コラボレーションをさらに低コストで利用する新たなチャンスを提供します。
KUKA.SafeOperationは、最新の安全関連のソフトウェアおよびハードウェアコンポーネントを組み合わせています。これにより、作業範囲と保護範囲を指定して、同時に監視できます。
そのため、作業範囲の機械的な監視を使う必要はありません。その上、サイクルタイムを短縮できます。
KUKA.SafeOperationは、ヒューマン・ロボット・コラボレーション(HRC)による安全で効率的な共同作業をサポートします。例えば手動装填ステーションに手作業で材料を装填する際に、安全な運転停止によって作業員との距離を縮めることができます。
その中心にあるのは安全性です。このソフトウェアは、理論的な作業領域を安全に減らすために最大16の監視領域と固定セル領域を提供します。この監視領域の定義によってロボットの挙動が決定されます。
どの領域も個別に指定できます。デカルト定義あるいは軸特有の定義のどちらかを選択します。さらに次の領域の種類を区別できます:
これらの機能はEthernetセーフティインターフェース(PROFIsafe、CIP Safety、FSоE)によってサポートされます。KUKAはこの他、あまり広範ではない設定のためにディスクリート・セーフティインターフェースであるX11/X13 Safe Operationを提供しています。
KUKA.SafeOperationソフトウェアは、例えばドライアイスブラストや接着などのさまざまなアプリケーションにおいて使用されます。
セル領域はセル内の安全フェンスの位置を定義します。
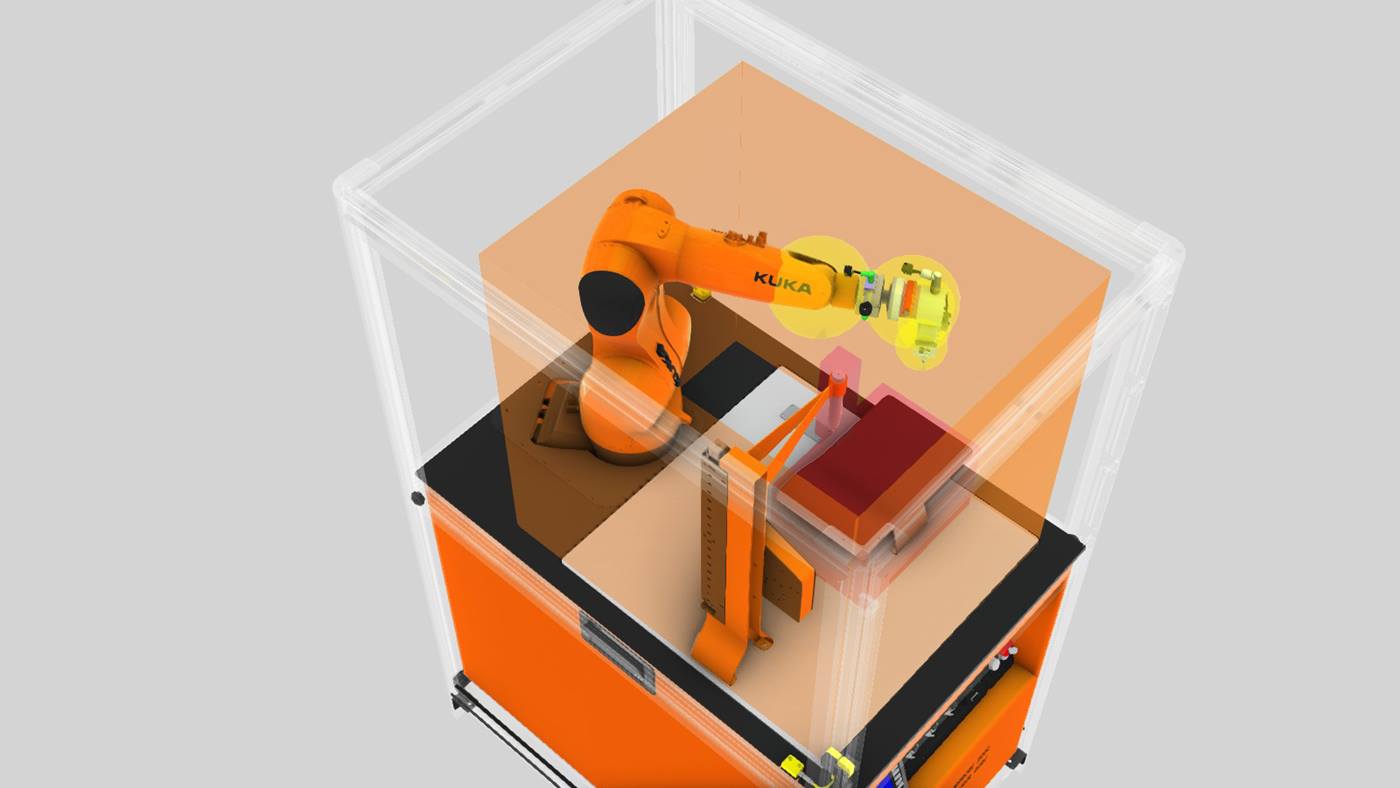
KUKA.SafeOperationソフトウェアを使用して、設定された作業範囲または保護範囲によってロボットの理論的な作業領域を減らします。
メリット:設備の必要スペースを減少させます。保護装置はこの狭められた実際の領域に限定されます。