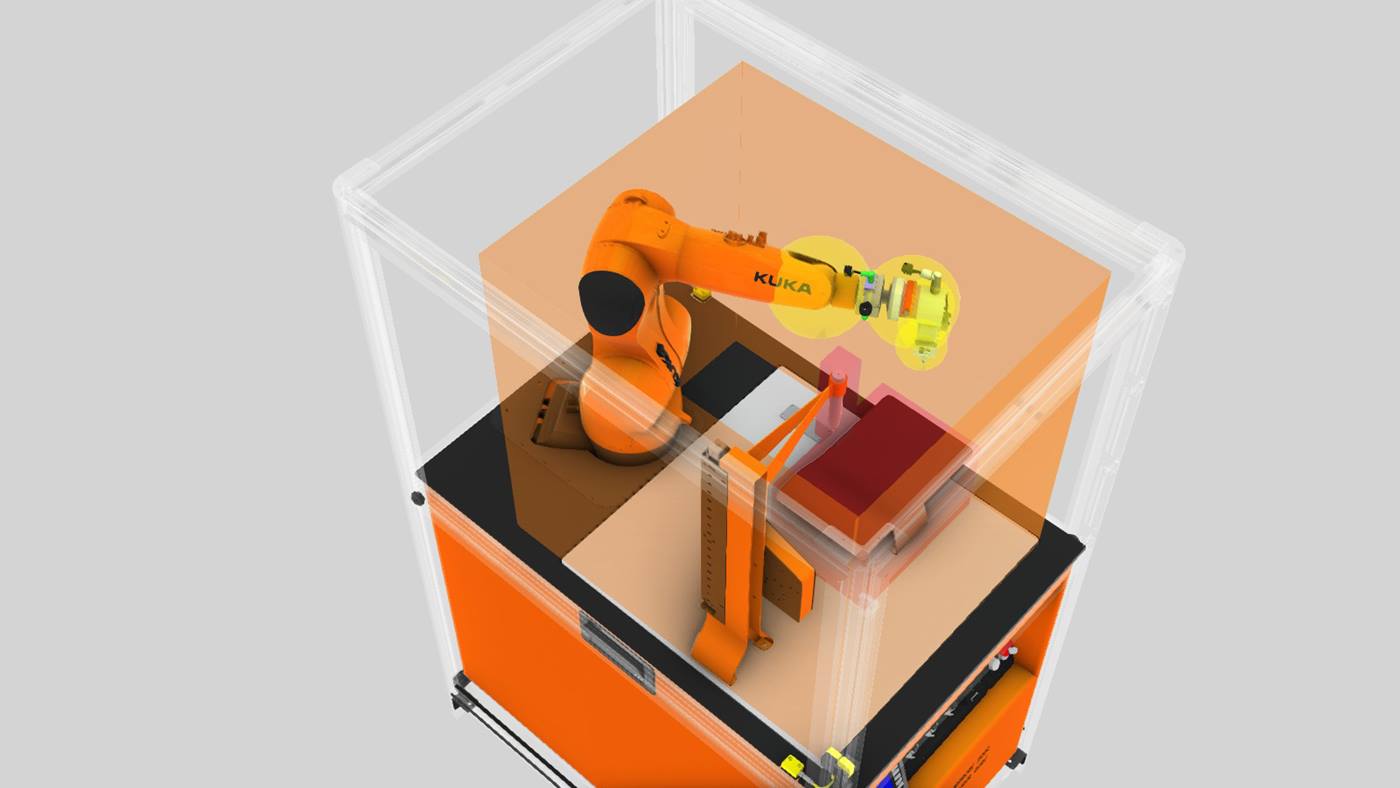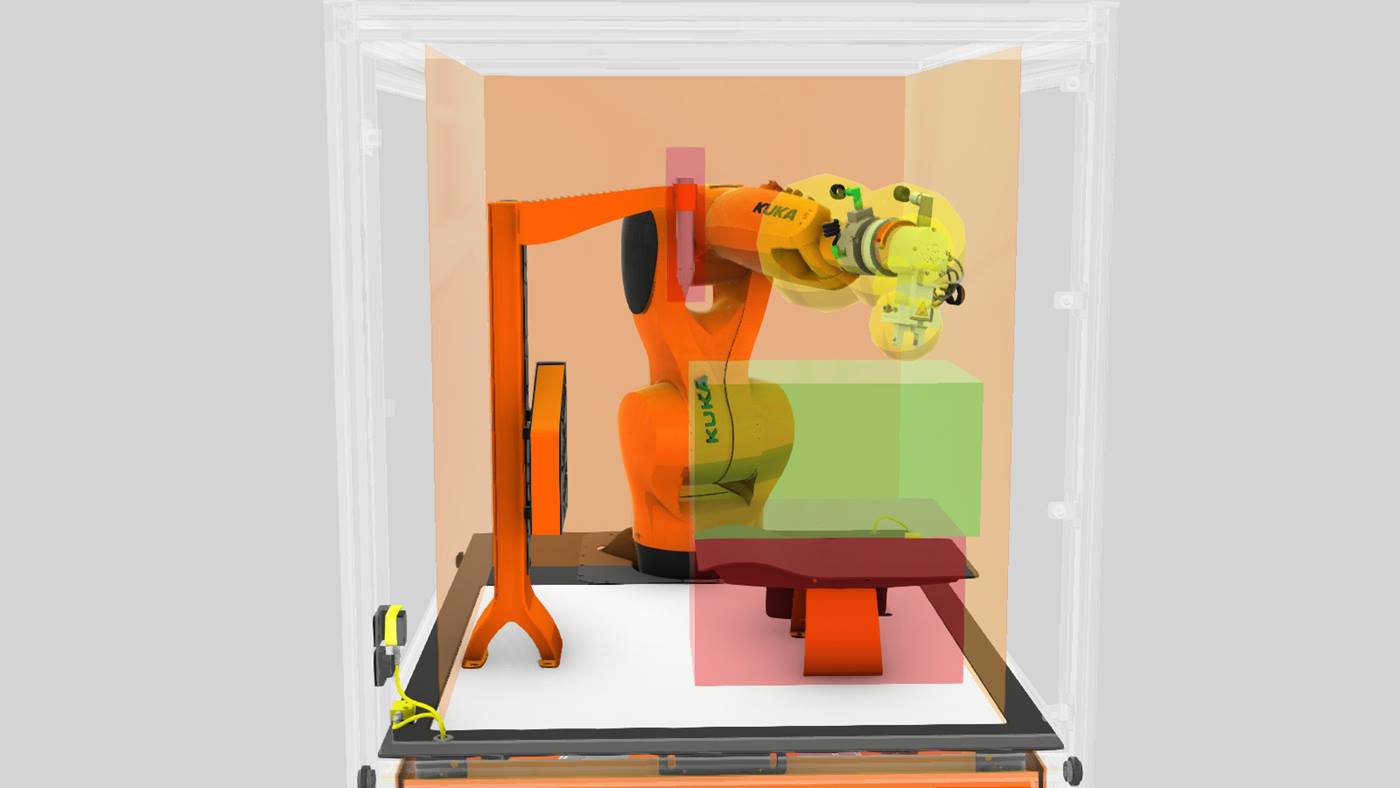
Überwachungsräume mit KUKA.SafeOperation
Im Fokus steht die Sicherheit. Die Software bietet zur sicheren Reduzierung des theoretischen Arbeitsraums bis zu 16 Überwachungsräume und einen festen Zellenbereich – die Definition dieser Überwachungsräume bestimmt das Verhalten des Roboters.
Jeder Bereich kann individuell festgelegt werden. Wählen Sie zwischen der kartesischen oder der achsspezifischen Definition. Zudem unterscheiden Sie zwischen diesen Raumarten:
- Arbeitsraum
- Schutzraum
- Melde-Schutzraum (nicht stoppend)
- Melde-Arbeitsraum (nicht stoppend)
- Zellenbereich (nicht schaltbar)