
Proces de învățare bazat pe inteligență artificială pentru optimizarea modelului CAD
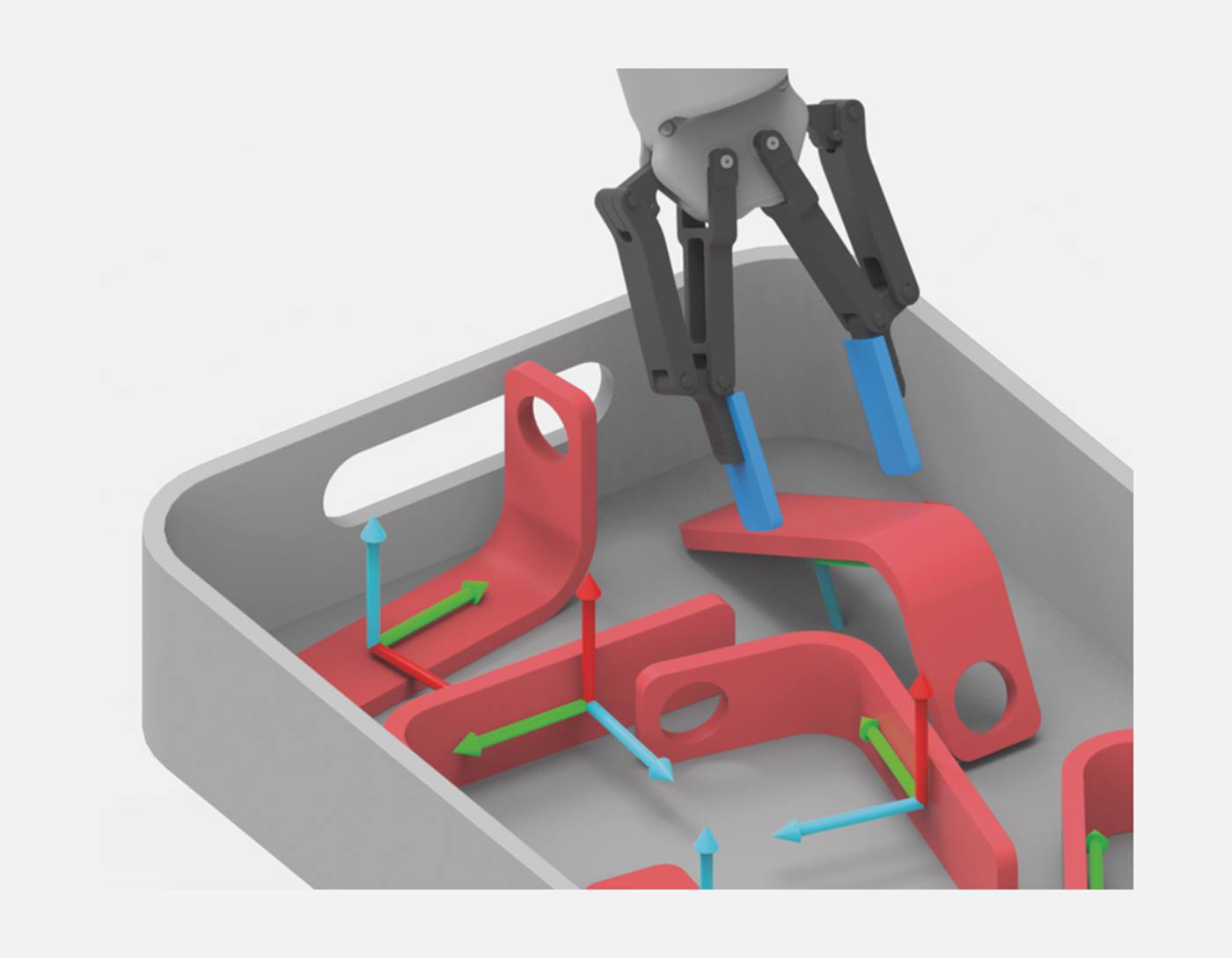
Recunoașterea obiectelor este exersată în prealabil într-un mediu de simulare fotorealistă. Aici, modelul CAD este optimizat în ceea ce privește reacțiile de culoare, materialele și condițiile de iluminare. „Fiecare obiect care trebuie preluat dintr-un container este învățat în prealabil în acest mediu de simulare susținut de inteligența artificială pe o anumită perioadă de timp. Acest proces de învățare se poate derula peste noapte, astfel încât aplicația să poată fi utilizată deja a doua zi”, spune Michael Hohenäcker, manager de portofoliu pentru manevrare și viziune la KUKA. Prin utilizarea inteligenței artificiale, recunoașterea este optimizată pentru orice obiecte, astfel încât acestea pot fi identificate chiar și în scenarii dificile.




