


Avanzando hacia el futuro con la osteotomía rotacional acetabular asistida por robot
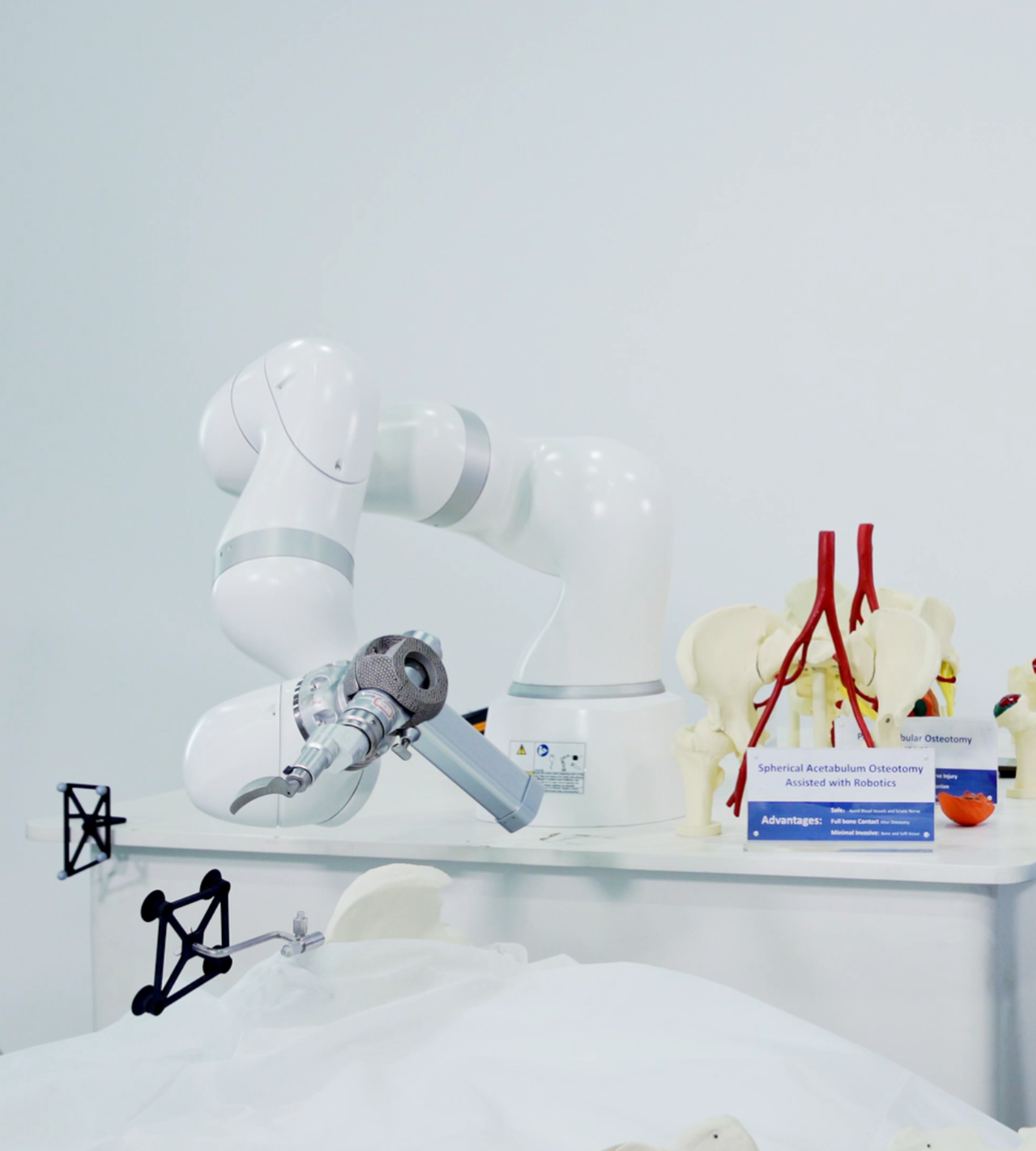
Shanghai Sixth People's Hospital ha fabricado el primer prototipo de dispositivo de osteotomía esférica en China. Confiarán y se verán respaldados por los recursos de I+D, producción y marketing del Shanghai Electric Group para mejorar y perfeccionar el sistema, pasar varias pruebas en la industria y finalmente entrar en el mercado.
Esperan que sus productos se promuevan en todo el mundo en beneficio de la población mundial y se conviertan en una buena ayuda para los médicos.
Esperan que sus productos se promuevan en todo el mundo en beneficio de la población mundial y se conviertan en una buena ayuda para los médicos.
