


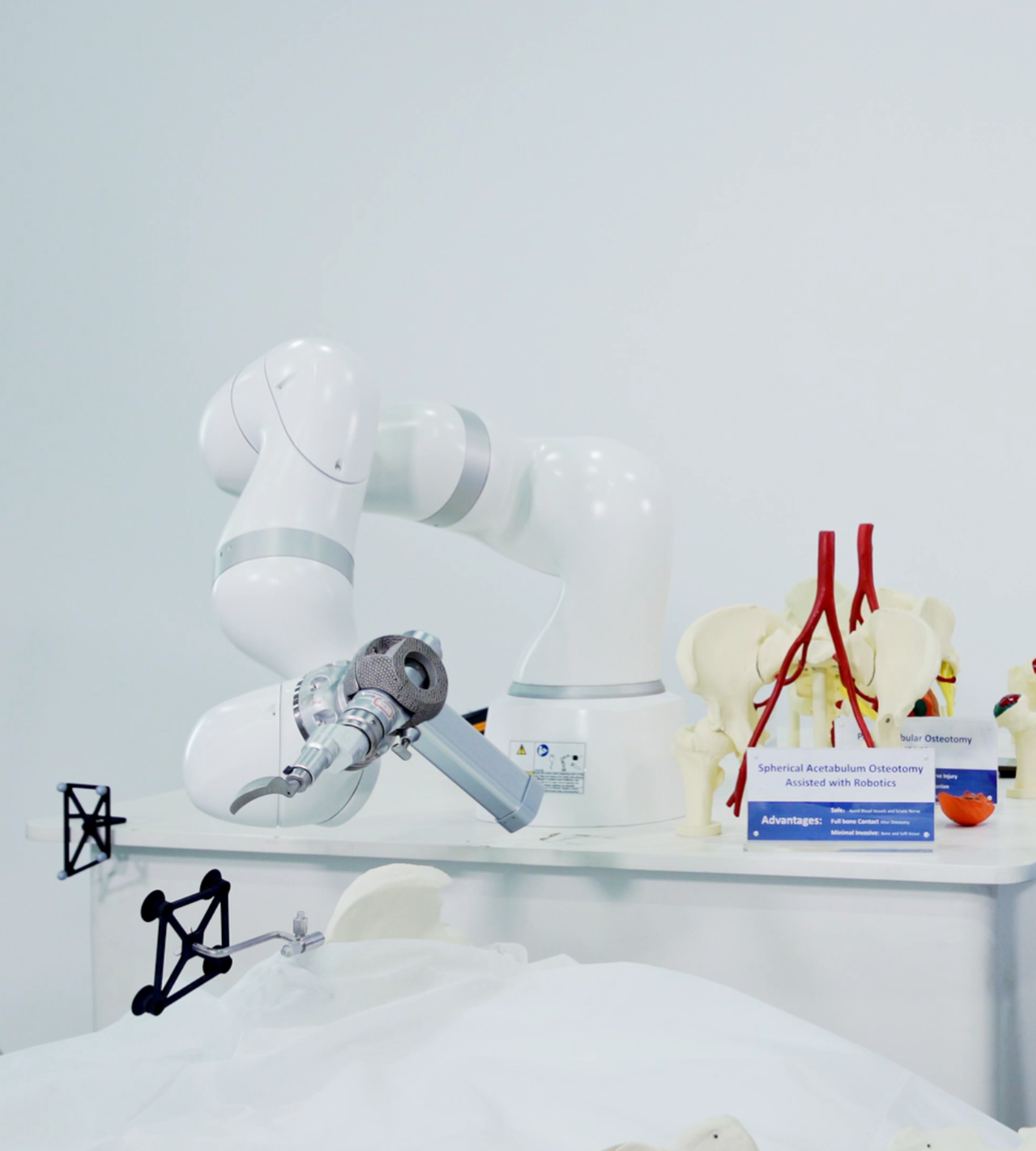
Looking towards the future with robotic-assisted acetabular rotational osteotomy
Shanghai Sixth People's Hospital has produced the first prototype of a spherical osteotomy device in China. They will rely on and be supported by the R&D, production and marketing resources of Shanghai Electric Group to improve and refine the system, pass various tests in the industry and finally enter the market.
They hope that their products will be promoted all over the world for the benefit of the world's people and become a good helper for doctors.
They hope that their products will be promoted all over the world for the benefit of the world's people and become a good helper for doctors.
