Korzystasz ze starszej wersji przeglądarki Internet Explorer. Aby zapewnić optymalnie działanie, zaktualizuj przeglądarkę
Z firmą KUKA w przyszłość Przemysłu 4.0
Co niesie ze sobą przyszłość Przemysłu 4.0? Jedno jest pewne: przyszłość już nadeszła. Sztuczna inteligencja wkracza do świata produkcji. Maszyny zaczynają się same programować i zwiększać wydajność produkcji bez udziału człowieka. Świat fizyczny i cyfrowy są ze sobą coraz ściślej połączone.
Przemysł 4.0: Rzut oka w przyszłość
Pojęcie Przemysł 4.0 jest już znane od kilku lat. Podobnie jak związane z nim technologie, np. internet rzeczy, chmura obliczeniowa lub sztuczna inteligencja (Artificial Intelligence, AI), które też nie pojawiły się wczoraj. Mimo to niemal codziennie dokonują się istotne osiągnięcia techniczne. Wyróżniają się przy tym trzy trendy.
Sztuczna inteligencja (AI) już teraz jest jedną z sił napędowych transformacji cyfrowej, a w przyszłości jej znaczenie jeszcze wzrośnie. Dzięki AI maszyny będą np. w stanie same się konserwować predykcyjnie. Roboty stosowane w Smart Factory przekształcają się w autonomiczne asystenty, które potrafią same się programować, działać logicznie i komunikować się ze sobą.
Także uczenie maszynowe (Machine Learning), jako jeden z najważniejszych dla firmy KUKA obszarów AI, toruje sobie drogę do zakładu produkcyjnego i niedługo stanie się stałą częścią Smart Factory. Uczące się maszyny mogą „rozumieć” wygenerowane przez siebie schematy i związki przyczynowo-skutkowe. „Uczą się” i reagują w czasie rzeczywistym, samodzielnie udoskonalając swoje algorytmy.
Nie mniej rewolucyjną koncepcją jest rzeczywistość mieszana (Mixed Reality). Jest to połączenie technologii wirtualnej rzeczywistości (Virtual Reality, VR) i rzeczywistości rozszerzonej (Augmented Reality, AR). Wirtualna rzeczywistość oznacza, że użytkownik jest całkowicie odcięty od realnego świata i znajduje się w wirtualnym środowisku, widocznym dzięki okularom. W przypadku rzeczywistości rozszerzonej rzeczywiste otoczenie pozostaje widoczne, ale są na nie nałożone treści cyfrowe (obiekty wirtualne, informacje). Technologia rzeczywistości mieszanej umożliwia połączenie wirtualnych treści ze światem rzeczywistym. W przeciwieństwie do rzeczywistości rozszerzonej, w rzeczywistości mieszanej treści nie są po prostu rzutowane, lecz za pośrednictwem mobilnych urządzeń końcowych lub hełmów wideo, takich jak Microsoft HoloLens, pojawiają się w postaci hologramu zintegrowanego realistycznie ze światem fizycznym. Hologram ten można przesuwać i zmieniać, jakby był prawdziwym przedmiotem.
Jak widać, przyszłość już nadeszła. Ale jakie są praktyczne zastosowania tych technologii w przemyśle? Przyjrzyj się kilku projektom innowacji w firmie KUKA.
Interfejs rzeczywistości mieszanej: Dane pod ręką
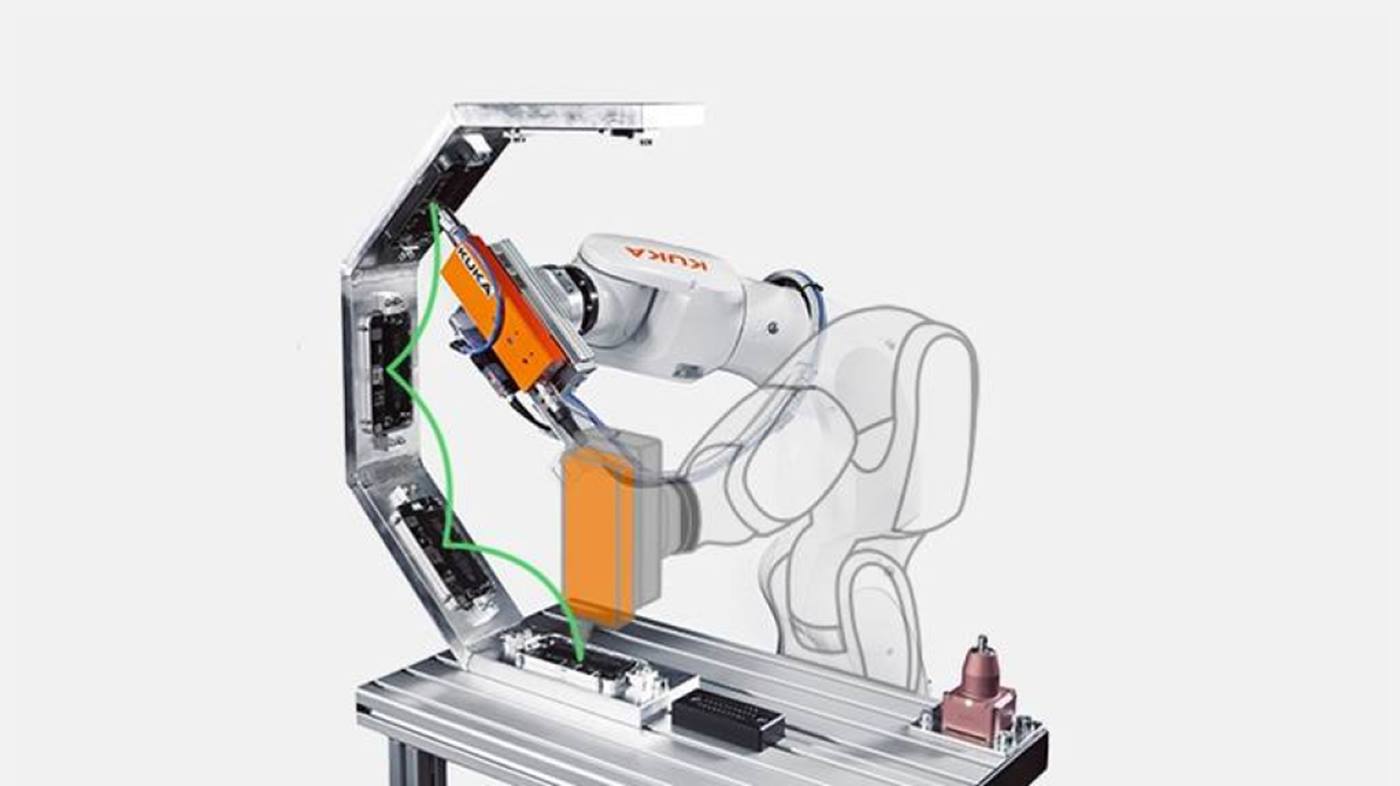
W naszym pilotażowym projekcie Interfejs rzeczywistości mieszanej wytyczamy nowe ścieżki w dziedzinie interakcji człowieka z robotem: Korzystając z hełmu wideo (np. Microsoft Hololens) lub aplikacji na tablecie lub smartfonie, użytkownicy mogą zobaczyć dane dotyczące strefy ochronnej i obszaru roboczego oraz toru ruchu robota bezpośrednio przy module, aby móc dokonać ingerencji i zaprogramować odpowiednie wartości zadane. Dzięki temu wykonywanie zadań związanych z uruchomieniem staje się znacznie bardziej intuicyjne i łatwiejsze dla użytkownika.
Interfejs rzeczywistości mieszanej z punktu widzenia użytkownika: Strefa ochronna i obszar roboczy robota są wyraźnie widoczne.
Interfejs rzeczywistości mieszanej: Dane pod ręką
KUKA.Sim: Inteligentne oprogramowanie do symulacji dla robotów KUKA
Za pomocą naszego oprogramowania do symulacji KUKA.Sim można zaprogramować roboty poza otoczeniem produkcyjnym. Oprogramowanie umożliwia użytkownikom interakcję z cyfrowym bliźniakiem, czyli dokładnym wirtualnym odwzorowaniem późniejszego procesu produkcyjnego. Niezależnie od tego, czy chodzi o projektowanie procesu czy wizualizację przepływów materiałów i wąskich gardeł, czy kodu PLC: Symulacja 3D utworzona w oprogramowaniu KUKA.Sim obejmuje wszystkie procesy planowania. Obydwa układy sterowania: wirtualny i rzeczywisty pracują na tych samych danych: To, co zostało wirtualnie zaplanowane, zostanie dokładnie zrealizowane w rzeczywistości. Zapewnia to najwyższy poziom bezpieczeństwa podczas planowania procesów produkcyjnych przy niewielkim nakładzie pracy i kosztach.
KIVI: Sztuczna inteligencja zmniejsza nakłady na konserwację
Jeśli można przewidzieć żywotność poszczególnych podzespołów robotów, można też uniknąć kosztownych awarii i przerw w produkcji. Właśnie o to chodzi we wspieranym przez ministerstwo gospodarki, energii i technologii kraju związkowego Bawarii (StMWi) projekcie badawczym o nazwie „Sztuczna inteligencja do przewidywania bezpieczeństwa eksploatacji i żywotności robotów przemysłowych” (KIVI). Celem jest ciągłe monitorowanie stanu robotów przemysłowych i umożliwienie konserwacji predykcyjnej (Condition Monitoring i Predictive Maintenance). Najpierw kilka czujników przekazuje charakterystykę drgań poszczególnych podzespołów robota. Podczas analizy odpowiednich danych wykorzystuje się wówczas sztuczną inteligencję: rozpoznaje ona schematy towarzyszące powstawaniu stanów zużycia i na tej podstawie uczy się modeli zachowań. W rezultacie powstaje prototypowy przybornik AI, który jest już w fazie oceny. Po jego komercyjnym wdrożeniu przedsiębiorstwa produkcyjne będą w stanie zwiększyć dostępność swoich instalacji i wydajność produkcji, co przyczyni się do oszczędzania zasobów.
Zalety monitorowania i konserwacji prewencyjnej przy użyciu AI
Zwiększa dostępność instalacji.
Podnosi efektywność przebiegu produkcji.
Oszczędza zasoby.
Translearn: roboty uczą się, jak się uczyć
Punktem wyjścia dla wszystkich procesów optymalizacji robotów przemysłowych są dane. Jednak ich pozyskiwanie i gromadzenie pochłania dużo czasu i pieniędzy. Aby zaoszczędzić, dane można obecnie gromadzić również poprzez symulowanie interakcji robota. Problem: Nawet bardzo zaawansowane symulacje nie są jeszcze w stanie dokładnie odwzorować rzeczywistości. Procedur wyuczonych w ramach symulacji nie da się bez problemu zastosować w prawdziwym robocie. Problem ten jest często określany jako „rozdźwięk z rzeczywistością” (Reality Gap).
Właśnie na tym polega nasz projekt „TransLearn”: Chcemy przezwyciężyć rozdźwięk z rzeczywistością, identyfikując błędy symulacji. Celem jest płynne przenoszenie wyników uzyskanych dzięki symulacji na rzeczywiste roboty.
Niesie to za sobą wiele korzyści: Dzięki symulacji można szybciej i lepiej programować roboty, co obniża koszty programowania. Poza tym roboty mogą się uczyć sprawniej i bardziej samodzielnie, jeśli nauka następuje zarówno w ramach symulacji, jak i w rzeczywistej instalacji. Dzięki zoptymalizowanemu w ten sposób procesowi uczenia się w przyszłości roboty w ogóle nie będą wymagały kosztownego programowania, lecz jedynie poinstruowania. Dzięki temu samodzielnie nauczą się, w jaki sposób skrócić czasy taktowania lub zużywać mniej prądu.
OPERA: bardziej precyzyjne sterowanie robotem.
Dzięki OPERA użytkownicy widzą prawdopodobne sekwencje ruchów swoich kobotów. Roboty współpracujące, tzw. koboty, uczą się w ten sposób, że użytkownik ręcznie wykonuje nimi żądane sekwencje ruchów. Dlatego używa się również określenia prowadzenie ręczne. Metoda ta ułatwia wiele procesów, przede wszystkim w firmach średniej wielkości. Jednak mimo intuicyjnej obsługi procedura te wiąże się z pewnymi subtelnościami w zakresie dokładności i tolerancji błędów, zatem programowanie nadal wymaga zaangażowania specjalisty.
W tym momencie do gry wkracza projekt OPERA: Ponieważ w przypadku kobotów nie wszystkie źródła błędów można określić deterministycznie, stworzyliśmy modele probabilistyczne. Użytkownicy mogą po prostu zobaczyć na modelu 3D, gdzie podczas sekwencji ruchów kobota pojawiają się niedokładności i odpowiednio na nie zareagować. W ten sposób odnoszą korzyści dzięki większej elastyczności, dokładności oraz odporności na awarie.
Dzięki OPERA użytkownicy widzą prawdopodobne sekwencje ruchów swoich kobotów.
Zestaw przewodów (zwany również „wiązką przewodów„” lub „siecią pokładową”) jest jednym z najbardziej pracochłonnych i złożonych podzespołów samochodu. Nowa seria wymaga bowiem stworzenia tylu osobnych zestawów przewodów, ile jest wersji wyposażenia: setek tysięcy. Ponieważ zestawy przewodów stanowią tego rodzaju produkty jednostkowe, ich wytwarzanie jest kosztowne. Dlatego wspólnie z innymi partnerami pracujemy nad wdrożeniem „powłoki zarządczej do zestawu przewodów” (VWS4LS). Bazując na technologii „powłoki zarządczej”, w ramach projektu informacje dotyczące każdego zestawu przewodów są dopełniane w taki sposób, aby można było stworzyć interoperacyjny cyfrowy bliźniak przeznaczony do projektowania, produkcji i montażu zestawu przewodów w samochodzie.
Firma KUKA skupia się przy tym na tworzeniu opisów produktów i procesów oraz na wyprowadzaniu ruchów robota potrzebnych do realizacji danego zadania produkcyjnego na podstawie odpowiednich informacji z powłok zarządczych.
Dowiedz się więcej o projekcie VW4LS.
BASys 4.2: Procesy produkcyjne stają się bardziej elastyczne
Firmy, które stosują nowoczesne procesy produkcyjne, muszą szybko reagować na zmiany popytu lub warunków. W związku z tym często konieczne jest dostosowanie procesu produkcji – dotyczące samego procesu lub zasobów produkcyjnych, ale także wytwarzanego produktu. Dlatego należy umożliwić tego rodzaju „ciągłe doskonalenie” w dowolnym momencie. Za pomocą BaSys 4 stworzono już układ bazowy do instalacji produkcyjnych, który umożliwia efektywne przekształcanie procesów produkcyjnych. W ramach projektu BaSys 4.2, wspieranego przez Federalne Ministerstwo Edukacji i Badań Naukowych (BMBF), pracujemy teraz nad wdrożeniem kolejnych elementów infrastruktury Przemysłu 4.0 w oparciu o koncepcje i standardy platformy Przemysł 4.0. Koncentrujemy się przy tym na trzech obszarach tematycznych: „oprogramowanie pośredniczące”, „zdolności” i „wirtualizacja”. W ten sposób chcemy dalej rozwijać znormalizowane modele zdolności produkcyjnych i realizować ich zastosowanie do zautomatyzowanych kontroli zdolności.
Celem jest stworzenie możliwych do przekształcenia instalacji produkcyjnych, które mogą w inteligentny i zrozumiały sposób reagować na zmienione wymogi.