


Pohled do budoucnosti s roboticky asistovanou rotační acetabulární osteotomií
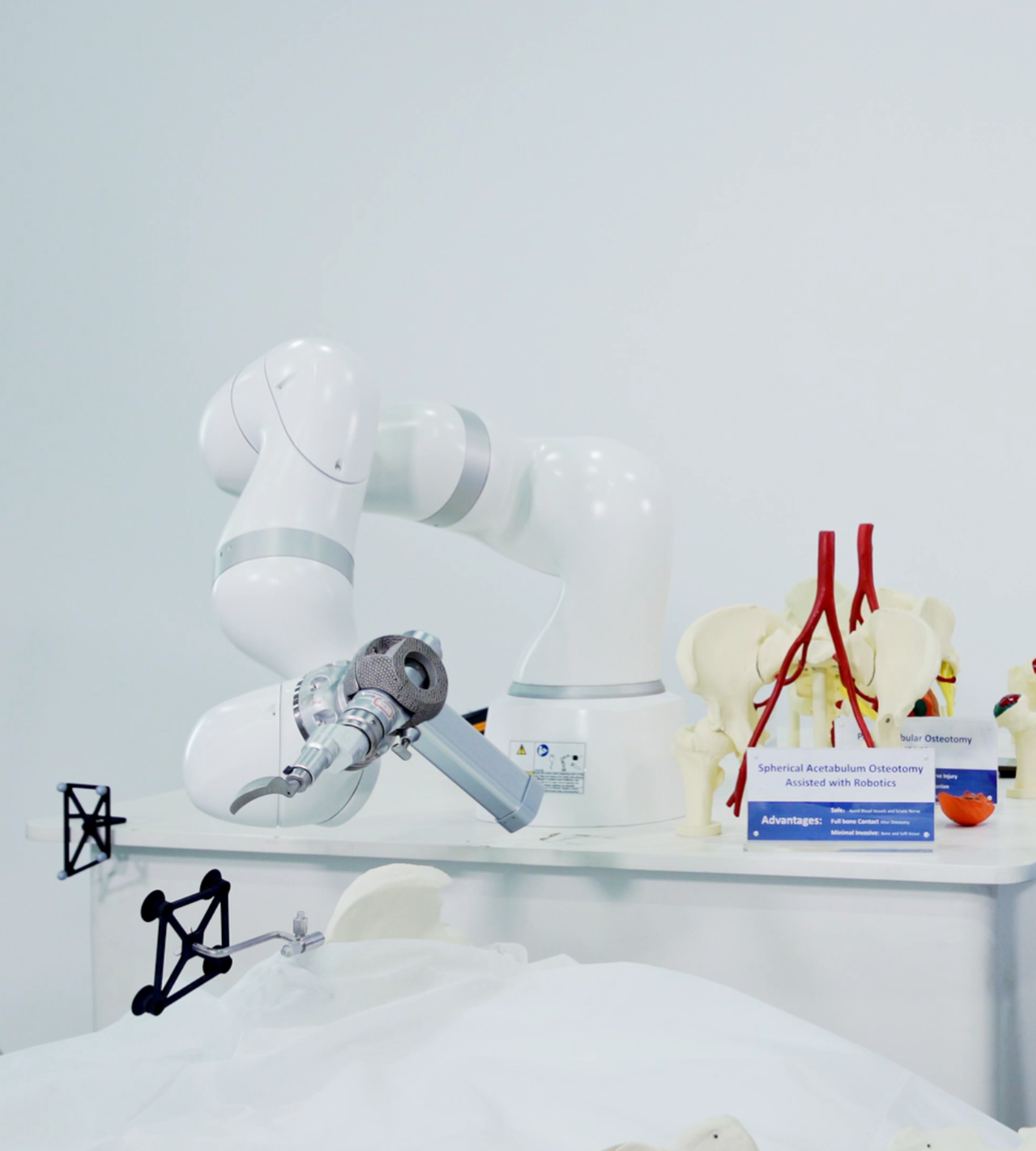
Šestá lidová nemocnice v Šanghaji vyrobila první prototyp zařízení pro sférickou osteotomii v Číně. V budoucnu se bude spoléhat na výsledky výzkumu a vývoje, výrobu a marketing společnosti Shanghai Electric Group a na její podporu při zdokonalování a dalším dolaďování systému, při absolvování různých testů v tomto odvětví a při konečném vstupu na trh.
Nemocnice doufá, že její výrobky budou propagovány po celém světě ve prospěch lidí z celého světa a stanou se dobrými pomocníky lékařů.
Nemocnice doufá, že její výrobky budou propagovány po celém světě ve prospěch lidí z celého světa a stanou se dobrými pomocníky lékařů.
