Používáte starší verzi prohlížeče Internet Explorer. Pro optimální zobrazení si prosím svůj prohlížeč aktualizujte
KUKA.RoboTeam
KUKA.RoboTeam umožňuje spolupráci až čtyř robotů v týmu. Dodatečně se mohou roboty synchronizovat pomocí kinematiky přídavných os, jako je polohovač obrobků nebo lineární osy robotu, aby bylo možno provádět časově a geometricky sladěné pohyby.
Časové a geometrické spojení se softwarem KUKA.RoboTeam
Časové spojení robotů
Pomocí softwaru KUKA.RoboTeam se klasické, centrální funkce PLC, jako je blokování pracovní oblasti nebo synchronizace programů, přenášejí přímo do skupiny robotů. Takto skupina robotů soběstačně převezme úlohy, které se jí přímo týkají.
Geometrické spojení robotů
Geometrické propojení dráhy a dopravy více robotů je spojeno s různými procesy. To umožňuje moderní plynulou výrobu a zaručuje značné zkrácení doby cyklu. Geometricky spojené roboty velmi flexibilně řeší všechny manipulační úkoly v rámci přepravy těžkých břemen a zaručují optimální umístění speciálních obrobků nestabilního tvaru. Pomocí této funkce lze rovněž provádět procesy souběžně s dopravou materiálu.
Dva roboty KUKA při manipulaci s extrémně těžkými díly z plochého skla.
KUKA.RoboTeam: Funkce pro časové a geometrické spojení robotů
Časové spojení robotů
Synchronizace programu: Synchronizované zahájení pohybu dvou nebo více robotů
Synchronizace pohybů: Synchronizovaná doba pohybu dvou nebo více robotů
Geometrické spojení robotů nebo robotů a kinematiky přídavných os
Metody rozdělení zátěže: Synchronizovaná práce dvou nebo více robotů
Procesně závislé pojíždění: Spolupráce dvou nebo více robotů v jednom procesu
Kombinované pojíždění: Kombinace pojíždění s rozdělením zátěže a pojíždění v závislosti na procesu
Rozšířený princip Master-Slave: Synchronní práce dvou nebo více robotů s kinematikou přídavných os
Nastavování synchronizačních příkazů probíhá u KUKA.RoboTeam prostřednictvím programového rozhraní robotu.
Změny dráhy nebo rychlosti jednoho robotu ve skupině se okamžitě projeví u všech zapojených robotů.
Všechny signály důležité pro bezpečnost jsou interním bezpečnostním sběrnicovým systémem ihned přeneseny do celé skupiny robotů.
Nouzové zastavení (zastavení kategorie 1) zúčastněného robotu způsobí synchronizované zabrzdění celé skupiny s dodržením dráhy.
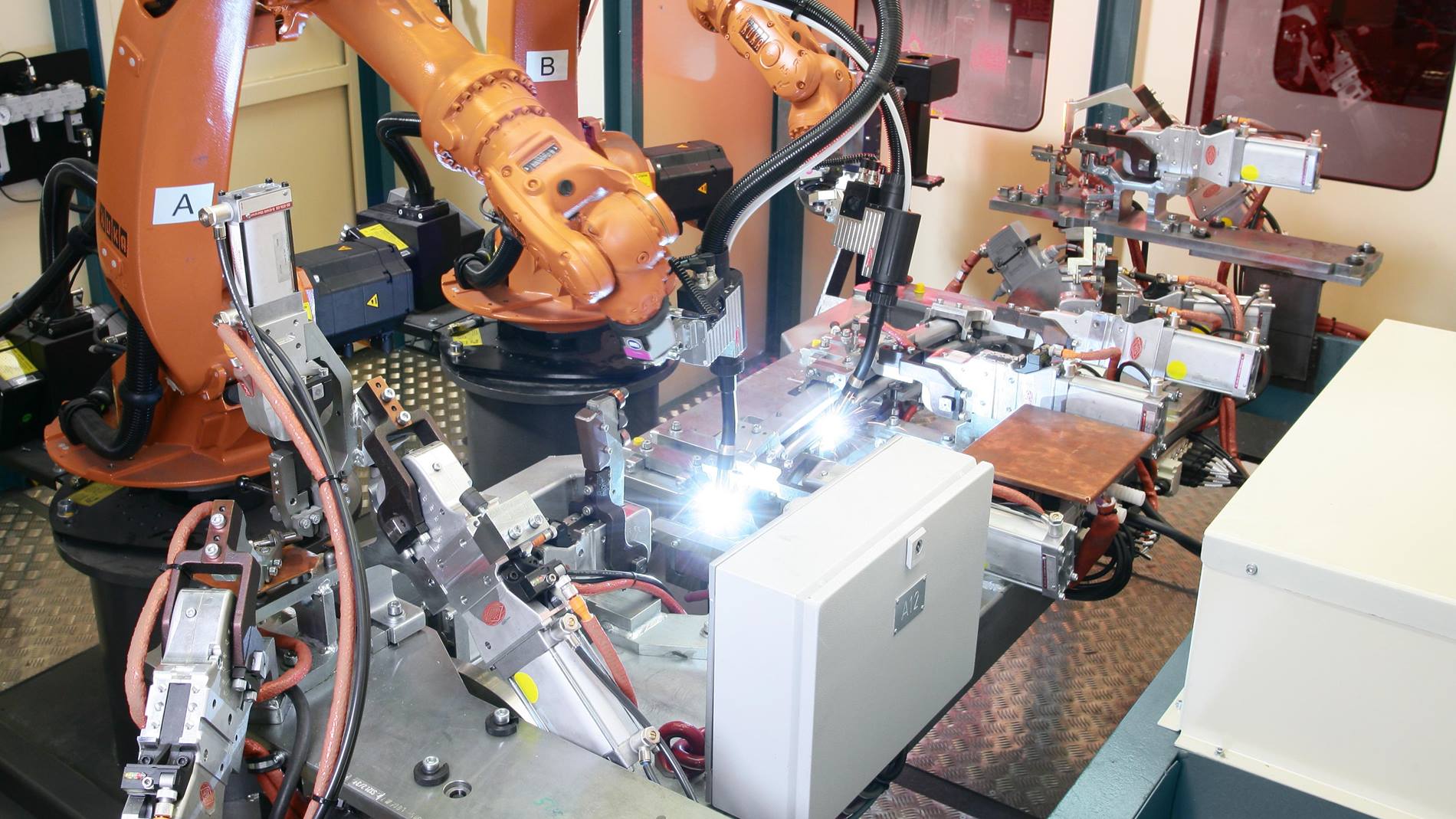
Pomocí softwaru KUKA.RoboTeam svařují konstrukční díly dva roboty KUKA současně.