Is my current application HRC ready?
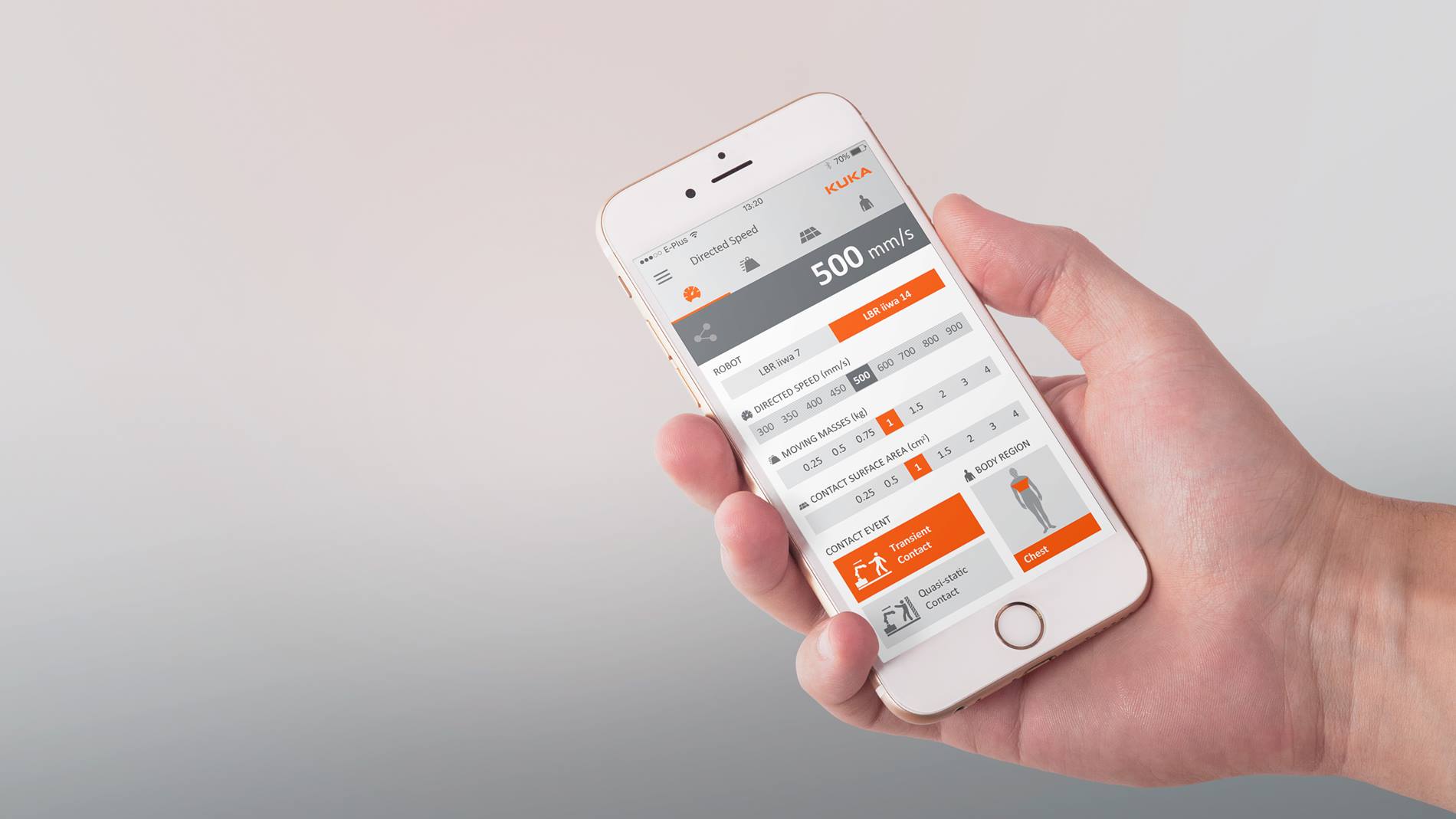
The HRC Guide App is a collaborative robot applications tool for anyone who designs or runs applications for Human Robot Collaboration (HRC). It provides a quick overview about the most relevant parameters regarding a HRC setting by calculating the maximum speed of the robot, the maximum payload mass, the minimum contact area (transient, meaning through a free push, or quasi-static, meaning with clamping risk) or the body regions of the human worker that could be hit by the robot. Based on the given input parameters, the free parameter is then calculated according to ISO TS 15066.
Let our collaborative robot application calculate these HRC parameters for you:
More features of our collaborative robot application
Robot Configuration: Fine tune the properties of the available robot types for certain applications (e.g. if additional cabling is attached). Adjusting the “Additional Payload” increases the upper limit for the payload mass calculation.
Unit and Language Settings: Choose between metric and imperial unit system. All inputs and outputs are updated accordingly. It is also possible to change the language.
Printed Calculator: There is also a printed version of this app available. It is based on the same calculations but is optimized for obtaining the maximum speed for transient contacts.
How to get the KUKA HRC Guide
You can install the KUKA HRC Guide for free on your mobile devices through the following platforms:


Feedback on our collaborative robot application
You've already used the KUKA HRC Guide and have something to say about the app? Then please give us your feedback via this form or in the comment section of the app stores. Thank you!