Riconoscere, strutturare, afferrare: come funziona il Bin Picking
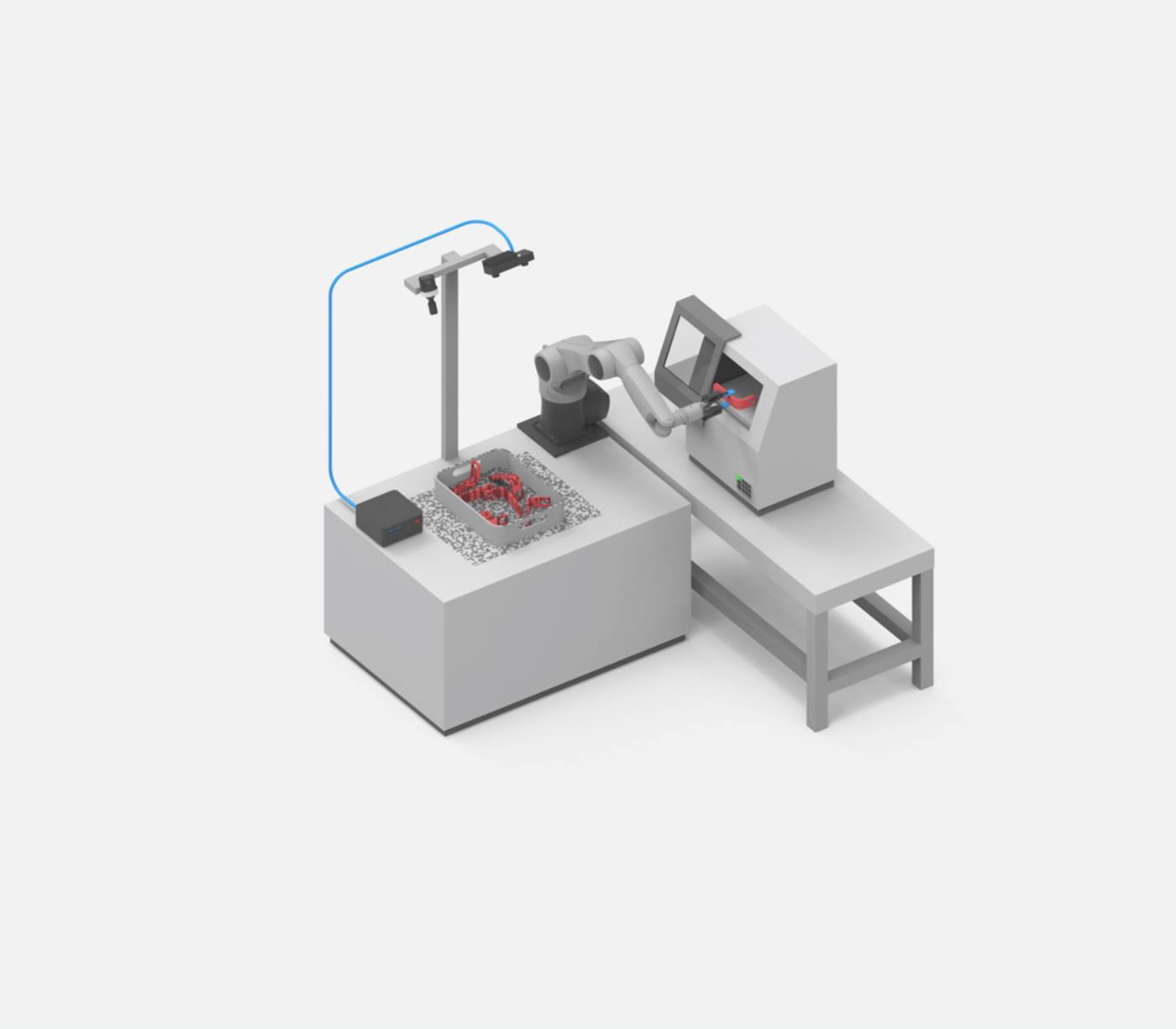
Afferrare in modo affidabile i pezzi da un cassone senza urtarlo: con il pacchetto tecnologico KUKA.SmartBinPicking, si può fare automaticamente. Il software, combinato con il riconoscimento visivo di Roboception, consente la presa senza collisioni e senza singolarità di pezzi da una scatola da parte di un robot a sei assi KR AGILUS, KR CYBERTECH o KR IONTEC, ad esempio.
I componenti a rinfusa non rappresentano una sfida
La telecamera 3D rileva gli oggetti disposti in modo casuale e definisce le priorità. Ciò significa: il software struttura quale componente è meglio afferrare e determina così una sequenza ottimale. La pianificazione integrata dei percorsi calcola il percorso senza collisioni per il Bin Picking, compresi tutti gli angoli per prelevare pezzo per pezzo dalla scatola. La presa con il quinto asse, ovvero con la mano del robot, consente di ottenere angoli molto più precisi.
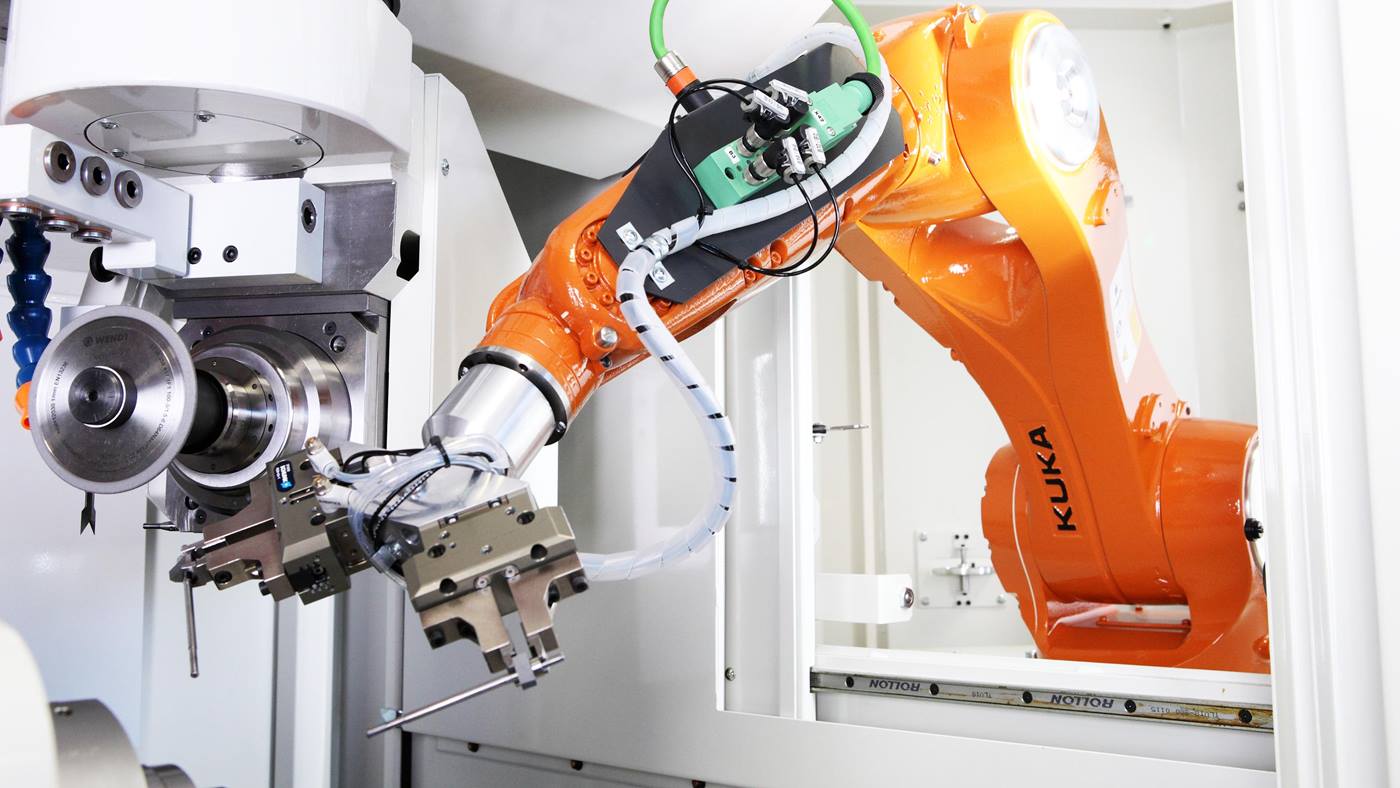
Applicazione robotizzata di Bin Picking
Spianare la strada all'automazione e all'Industria 4.0
Mentre il robot preleva un pezzo dal cassone con una presa estremamente precisa, in parallelo viene già progettato il percorso successivo. In questo modo si riducono i tempi di ciclo. L'elaborazione delle immagini della telecamera 3D e la pianificazione del percorso vengono eseguite su un PC industriale esterno su cui è installato un plug-in KUKA. Ma il cliente non deve preoccuparsi di questo, perché riceve un pacchetto software già pronto. Allora si tratta solo di spianare la strada alla presa nel cassone e al Bin Picking intelligente.
Quale ruolo svolge l'intelligenza artificiale nel riconoscimento degli oggetti?
Per preparare al meglio la presa nel cassone e il Picking intelligente, un modello CAD viene caricato in un ambiente di simulazione fotorealistico. Qui il sistema viene collaudato e l'immagine viene ottimizzata in base a tutti i requisiti grazie a un'ampia libreria, ad esempio per quanto riguarda le reazioni cromatiche e le condizioni di illuminazione. Questo processo automatizzato può essere eseguito durante la notte, in modo che l'applicazione robotica possa essere utilizzata il giorno successivo.