Korzystasz ze starszej wersji przeglądarki Internet Explorer. Aby zapewnić optymalnie działanie, zaktualizuj przeglądarkę
KUKA i KUBE
Jak Polscy naukowcy z Politechniki Łódzkiej postanowili wykorzystać roboty KUKA w sposób nieszablonowy
Robotyka przemysłowa przyzwyczaiła nas do pewnego zestawu czynności, które nieodmiennie kojarzą nam się z robotami. Czy to przy stanowiskach spawalniczych, lakierniczych, czy przy zadaniach typu pick and place. Przy tym dominującym obrazie robotów nie trudno zapomnieć o tym, że mogą one mieć swoje inne, niekomercyjne oblicze. O tym jak Polscy naukowcy z Politechniki Łódzkiej postanowili wykorzystać roboty w sposób nieszablonowy, dowiecie się z poniższego artykułu.
Robot KUKA na Politechnice Łódzkiej
Projekt KUBE
Pomysłem instytutu było stworzenie na uczelni stanowiska badawczego z udziałem robotów, które dzięki swojej wszechstronności i możliwości konfiguracji wielu parametrów, dałoby bazę do prowadzenia licznych badań z różnych dziedzin naukowych. Uczelnia przystąpiła do uszczegółowienia projektu i zakupu zintegrowanego stanowiska złożonego z robotów, chwytaków, zadajników i czujników wizyjnych, które zostały wytypowane już na etapie składania wniosku. W efekcie już niebawem w Zakładzie Sterowania Robotów miejsce zagrzały dwa nowe roboty KUKA LBR iiwa oraz cały dodatkowy osprzęt niezbędny do kontroli wizyjnej i siłowej współpracy maszyn z ludźmi. Ze względu na charakterystyczny, sześcienny kształt przestrzeni badawczej, nowe stanowisko ochrzczono mianem KUBE.
Dlaczego KUKA?
Projekt zakładał, że stanowisko ma służyć do badania interakcji ludzi z robotami na różnych płaszczyznach. Tym samym pod kątem wniosku rozpatrywane były jedynie roboty współpracujące, które w dalszym ciągu są swoistym novum w branży. Tym bardziej były one nowością kilka lat temu, gdy powstawał pierwszy zarys projektu. Pracownicy i doktoranci Instytutu Automatyki odwiedzali targi branżowe oraz stanowiska badawcze na Politechnice Warszawskiej, Politechnice Poznańskiej oraz Politecnico di Milano, gdzie pracowały już roboty KUKA. Cieszące się wzorową opinią, stanowiłyby idealnych kandydatów do stanowiska na łódzkiej uczelni. Jednak ówcześnie KUKA nie posiadała jeszcze w swojej ofercie robotów współpracujących.
LBR iiwa - premiera
Sytuacja uległa zmianie w 2015 roku, kiedy to miała miejsce oficjalna premiera robota współpracującego LBR iiwa. Nie dość że spełniał podstawowe założenia projektantów stanowiska badawczego, miał siedem stopni swobody i możliwość dowolnego montażu, to posiadał jeszcze jednego asa w swoim robotycznym rękawie – kilka trybów współpracy z zewnętrznymi układami sterowania w tym integrację z Robot Operating System (ROS). Robot o takich parametrach gwarantował solidną postawę do projektu, zapewniając przy tym elastyczność, która pozwoliłaby rozwijać różne pomysły. W ten sposób do wniosku z 2015 roku włączone zostały roboty KUKA LBR iiwa.
Na uczelni, będąc nieograniczonymi przez komercję, mamy sposobność rozwijania niestandardowych rozwiązań
Elastyczność ponad wszystko
Prof. Granosik dodaje: "Fabryka zainwestuje w to, co przynosi zwrot z inwestycji. Dzięki wsparciu Ministerstwa możemy swobodnie myśleć nad rozwijaniem własnych pomysłów." Nie jest to jednak jednoznaczne z tym, iż KUBE nie posiada zastosowań, które podlegałyby komercjalizacji. Wręcz przeciwnie – poprzez pełną konfigurowalność systemu i jego parametrów KUBE może spełnić się na wielu polach eksploatacji, a do uczelni należy ich opracowanie w drodze eksperymentów i ciągłych udoskonaleń całego systemu.
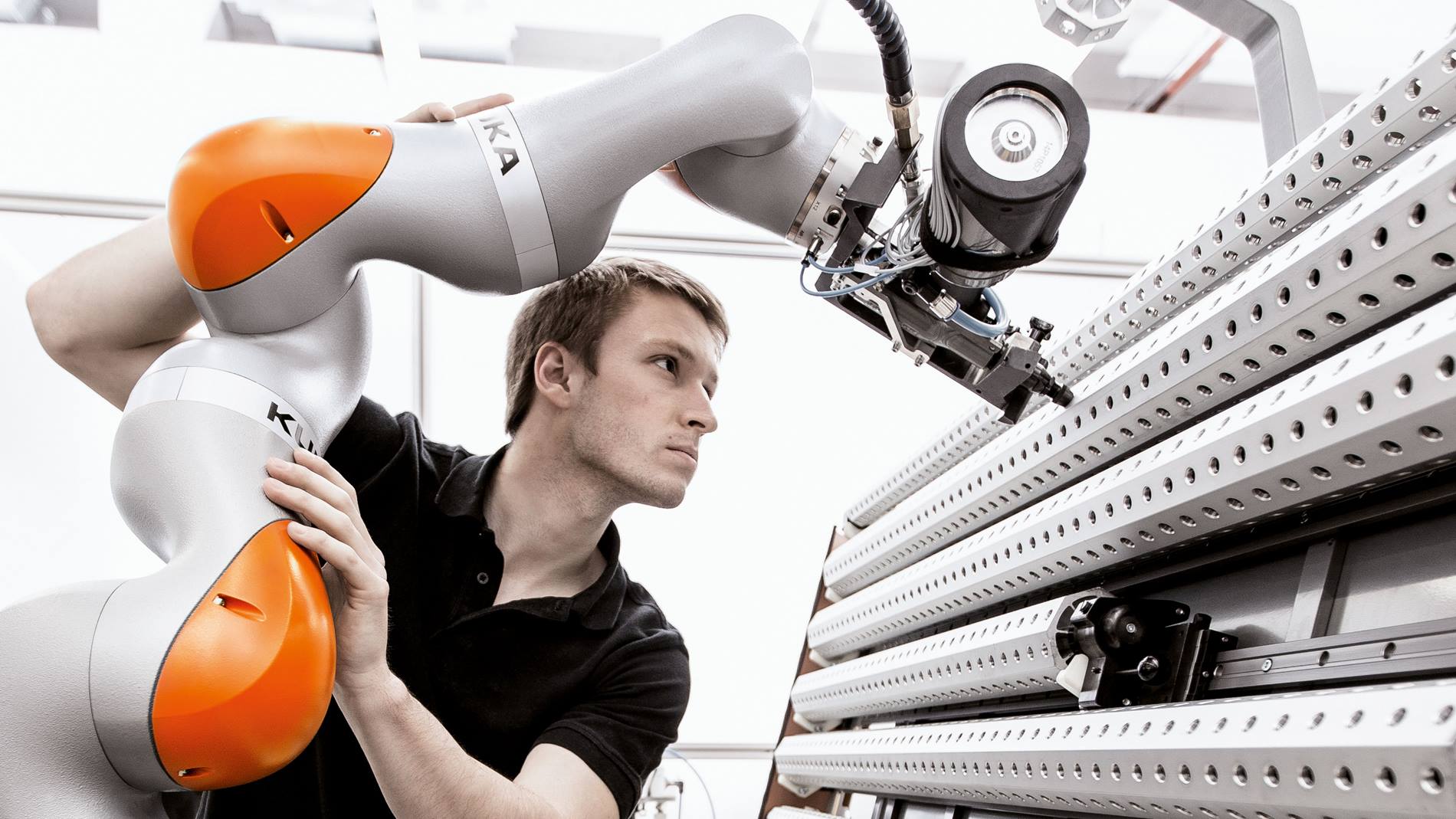
LBR iiwa na Politechnice Łódzkiej
Nowe perspektywy
Prof. Granosik przyznaje, iż pomysł na utworzenie stanowiska badawczego był naturalną drogą rozwoju projektów, które dotychczas funkcjonowały w obrębie Instytutu Automatyki. Pojawienie się robotów współpracujących otworzyło nowe perspektywy i pola badawcze. Ich potencjał, przejawiający się w mnogości zastosowań, jawił się pracownikom uczelni, jako doskonały punkt wyjścia do badań nad interakcją ludzi z robotami. W tej opinii utwierdzili pracowników instytutu również nowi doktoranci, którzy wnieśli do projektu wiele ciekawych pomysłów i świeże spojrzenie. Od pierwotnego projektu do wykonania minęły prawie trzy lata i w marcu 2016 naukowcy na Politechnice Łódzkiej powitali swojego nowego kolegę - KUBE. Firma KUKA, która dostarczyła roboty, zasugerowała firmę ARET jako godnego polecenia integratora. Za sprawą tej firmy KUBE nabrał swojego charakterystycznego kształtu.
Stanowisko badawcze KUBE
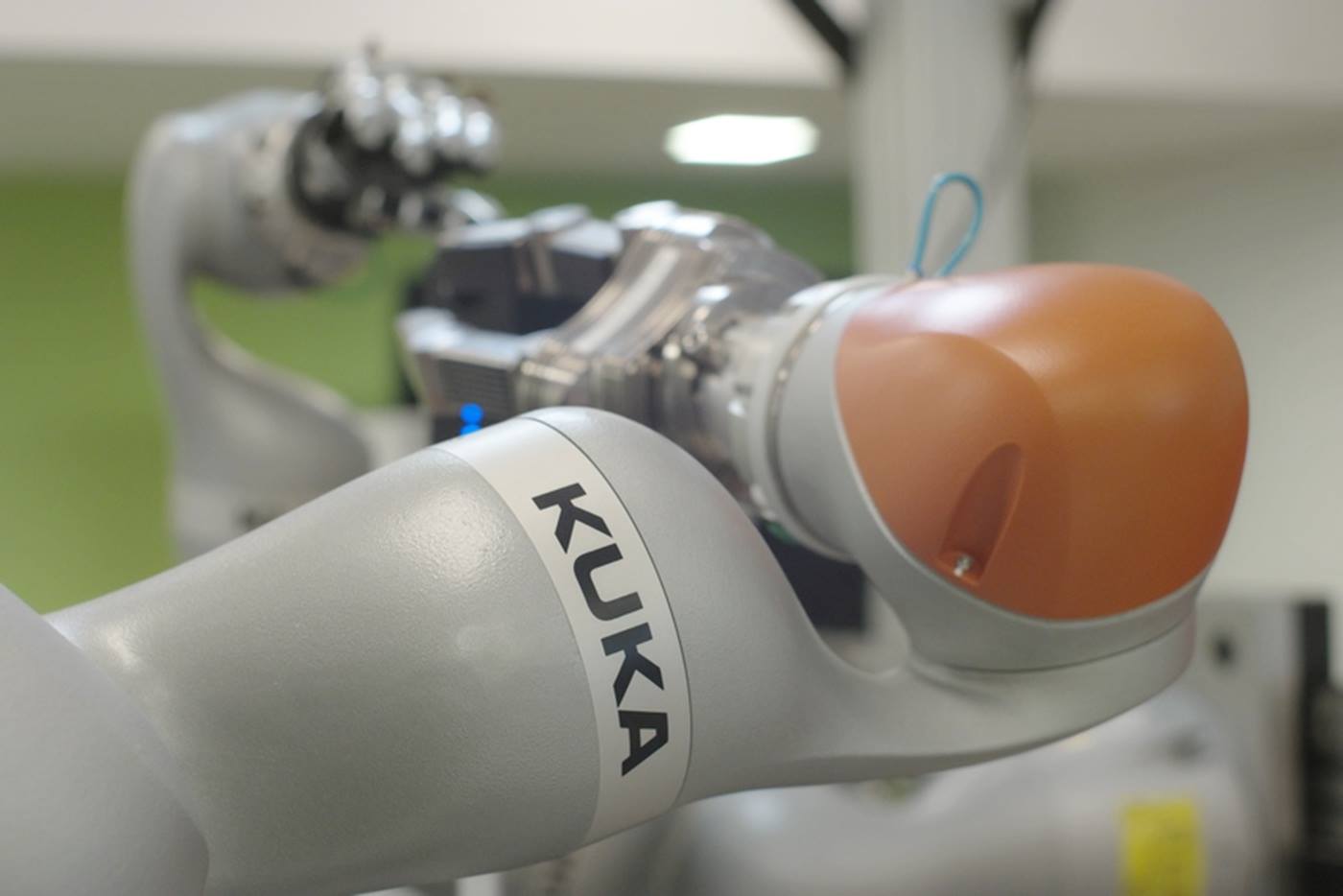
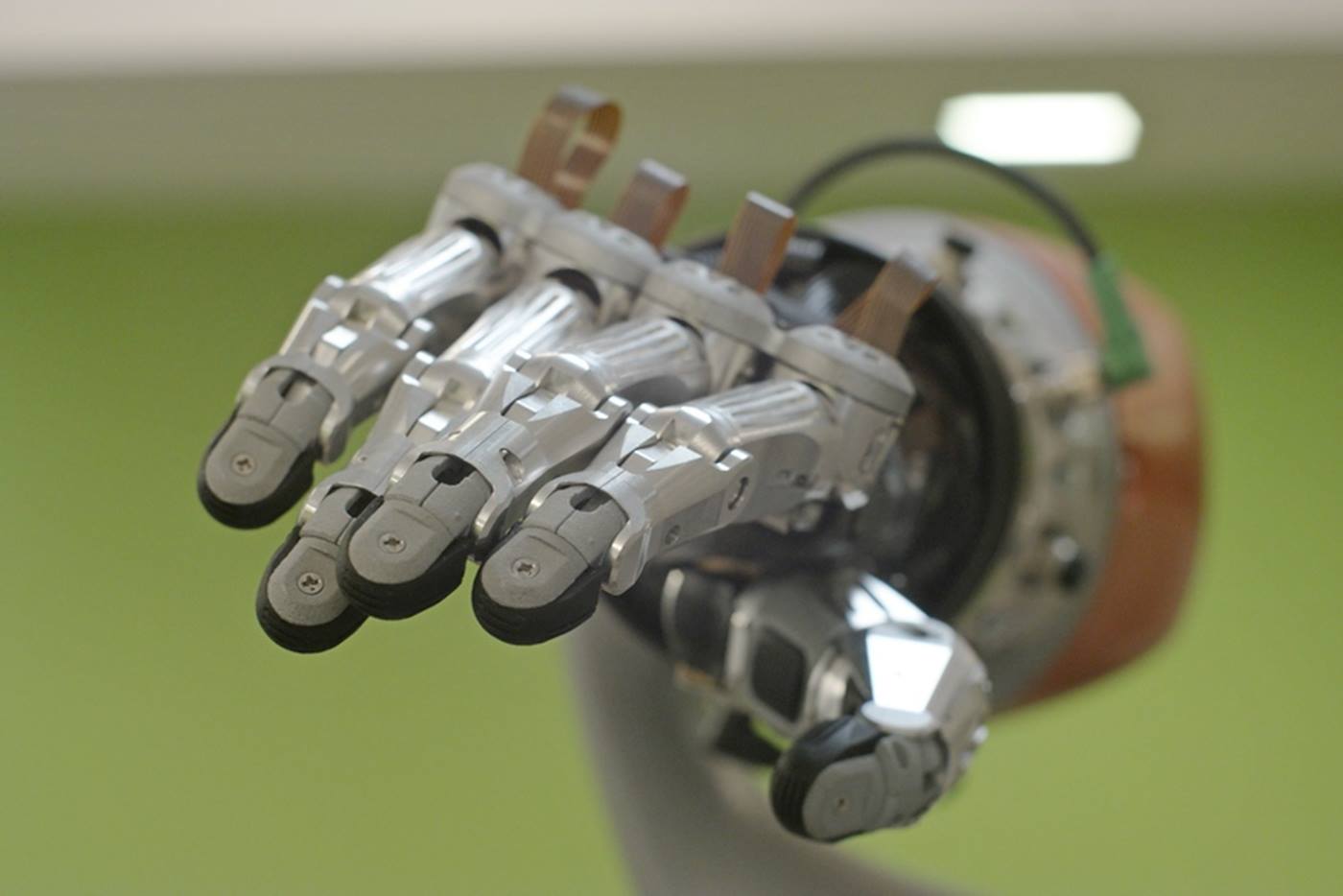
Stanowisko badawcze wyznacza sześcienna konstrukcja z aluminiowych profili. Na pionowych, przeciwległych bokach kwadratu umieszczono dwie prowadnice, do których przytwierdzono roboty. Prowadnice te mogą być umieszczone na dowolnej ścianie kostki oraz pod różnymi kątami, dzięki temu ramiona robotów pracują nie tylko w określonym promieniu – mogą również przemieszczać się liniowo względem całego układu. W efekcie ramiona są w stanie sięgnąć do dowolnego punktu w przestrzeni badawczej, a znaczna przestrzeń robocza jest dostępna dla obu ramion jednocześnie. Jako elementy zadające w układzie funkcjonują rękawice sensoryczne oraz siedmioosiowe układy haptyczne (omega.7), które umożliwiają sterowanie ruchem ramion robota poprzez ruchy rąk. Element wykonawczy to rzecz jasna roboty KUKA LBR iiwa, wyposażone w dwa chwytaki – trójpalczasty oraz pięciopalczasty, będący pierwszym tego typu urządzeniem w Polsce. Dzięki pracy w trybie impedancyjnym można precyzyjnie dostroić podatność ruchów robota, tak aby odpowiadała konkretnemu zadaniu. W obrębie stanowiska zainstalowano również system wizyjny, który zapewnia operatorowi wgląd w każdy kąt KUBE. Obraz może być wyświetlany na ekranie monitora, bądź na ekranie okularów wirtualnej rzeczywistości a także jest analizowany przez oprogramowanie Halcon.
Do wygodnej obsługi całości układu pisane jest oprogramowanie zgodne z Robot Operating System. Tak wszechstronny projekt stwarza jednak pewne trudności - "Dążymy do spójnego systemu sterowania bazującego na ROS - niestety nie wszystkie ze sprzętów są przystosowane do tego środowiska wprost,” przyznaje prof. Granosik. "Na stanowisko składa się wiele różnych produktów, które muszą ze sobą zostać połączone. Są to nowe rozwiązania, które zazwyczaj nakierowane są na aplikacje przemysłowe. Na uczelni chcemy wejść jak najgłębiej w ich układ sterowania i dojść do rozwiązań, które zapewnią nam pełną funkcjonalność."
Wewnątrz stanowiska badawczego KUBE
Pełna funkcjonalność w służbie ludzkości
KUBE nie jest układem komercyjnym sensu stricto. Nie powstał aby generować zysk, jak jemu podobne konstrukcje pracujące w fabrykach. Nie oznacza to jednak, że nie przysłuży się rozwojowi naukowemu, który za sobą pociągnie realne profity. Stanowisko to powstało jako możliwie elastyczny system, który pozwoli sprawdzić różne ustawienia, zestawione z myślą o różnorakich przeznaczeniach. Uczelnia pragnie przeprowadzać z udziałem robotów swoje prace badawcze, ale jak to podkreśla prof. Grzegorz Granosik, instytut nastawia się też na współpracę z innymi placówkami edukacyjnymi i komercyjnymi przedsiębiorstwami.
Pośród potencjalnych pól eksploatacji pojawiają się pomysły z różnych dziedzin naukowych. W świetle robotyki, KUBE jest wyjątkowo elastycznym środowiskiem, które potencjalnym klientom komercyjnym zapewnia optymalne warunki, do prowadzenia badań nad swoimi nowymi produktami. Tym samym możliwe jest ograniczenie kosztów związanych z prototypowaniem, a także sprawdzenie wielu ustawień bez konieczności tworzenia nowych stanowisk badawczych. Tym samym Instytut Automatyki stanowi rzetelnego partnera do prowadzenia badań, z wysoce rozwiniętym zapleczem technicznym.
Robot LBR iiwa z chwytakiem SCHUNK
Roboty KUKA centralnym elementem projektu
Główną myślą przewodnią, towarzyszącą projektowaniu stanowiska, było zastąpienie możliwości człowieka wprost. W związku z tym centralnym elementem całego układu jest para robotów KUKA, wyczuwających siłę kontaktu, a sterowanie nimi poprzez rękawice sensoryczne oraz zadajniki haptyczne i wizyjne stanowi na ten moment najbardziej wierne odwzorowanie ruchów rąk człowieka. Efektem tego jest możliwość symulowania działań, które mogłyby zostać wykonane poprzez manualną pracę człowieka, w układzie gdzie elementem wykonawczym są ramiona robota i jego chwytaki.
Politechnika Łódzka - partner naukowy oraz biznesowy
W momencie kiedy czytacie te słowa, KUBE prawdopodobnie pracuje w pocie serwonapędów. Jego wszechstronność i możliwość konfiguracji wielu parametrów może być wykorzystana nie tylko przez uczelnię, ale także przez podmioty zewnętrzne, które chciałyby przy jego pomocy przeprowadzić konkretne eksperymenty. Prof. Grzegorz Granosik otwarcie przyznaje, że liczy na współpracę firm z zewnątrz. Możliwości KUBE pozwalają znacznie ograniczyć wydatki na projekt na poziomie jego developmentu oraz prototypowania, a wysokiej jakości roboty dostarczone przez firmę KUKA gwarantują długą żywotność
i powtarzalność wykonywanych operacji.
Los projektu zmienił się w momencie, gdy zostały włączone do niego roboty współpracujące KUKA LBR iiwa. Może to właściwy czas, aby zainwestować w te roboty i pozwolić aby to Wasze przedsiębiorstwo było tematem kolejnego success story inspirowanego robotami KUKA.