Du använder en äldre version av webbläsaren Internet Explorer. För en så bra upplevelse som möjligt bör du uppdatera din webbläsare.
KUKA.HMI
Visualiseringsprogramvara för intuitiv och användarvänlig robotmanövrering: KUKA.HMI förenklar och effektiviserar kommunikationen mellan människa och maskin på ett helt nytt sätt.
Skräddarsydda programvarulösningar som effektiviserar: Människa-robot-kommunikation med KUKA.HMI
KUKA.HMI-produktserien erbjuder optimalt designade programvarulösningar för manövrering, styrning och övervakning av robotar i industriella produktionsmiljöer. Lösningarna finns i två olika utföranden anpassade för olika behov: KUKA.HMI easy och KUKA.HMI zenon. Snabbt och enkelt kan du nu designa om det generiska användargränssnittet på KUKA smartPAD till en skräddarsydd visuell representation – optimalt anpassad till användarens behov och utan behov av utbildning. Det faktum att KUKA.HMI är kompatibel med robotstyrningen KR C4 gör den till en optimal visualiseringsprogramvara både för enskilda industrirobotar och komplexa robotceller.
KUKA.HMI Easy: Robotmanövrering enkelt och okomplicerat tack vare programvara
KUKA.HMI Easy förenklar manövreringen av dina robotar. Programvaran låter dig optimera det som visas på din KUKA smartPAD, exempelvis kan du:
Infoga bilder
Strukturera visningen med flikar och kolumner
Dölja och visa knappar och andra funktioner
Växla mellan halv- och fullskärmsvisning
Använda andra tilläggsprogram, t.ex. en programeditor eller positionsvisning
Ändra landsspecifika enheter
Användarna orienterar sig lättare och manövreringsfel förebyggs.
KUKA.HMI Easy är den perfekta visualiseringsprogramvaran för mindre krävande situationer.
KUKA.HMI zenon: maximal användarvänlighet i de mest komplexa robotapplikationer
KUKA.HMI zenon är avseddför mer krävande robotapplikationer – i första hand produktionsceller –som nu kan hanteras på ett enkelt och smidigt sätt:Över 300 direktdrivrutiner möjliggör problemfri integration av perifer utrustning och/eller extra hårdvara. Användaren får en god överblick över alla komponenter och har tillgång till all relevant information – i kompakt presentation på en bildskärm.
Tilläggsprogrammet KUKA.HMI zenon: skräddarsydd programvara med bibehållna standardfunktioner för robotmanövrering
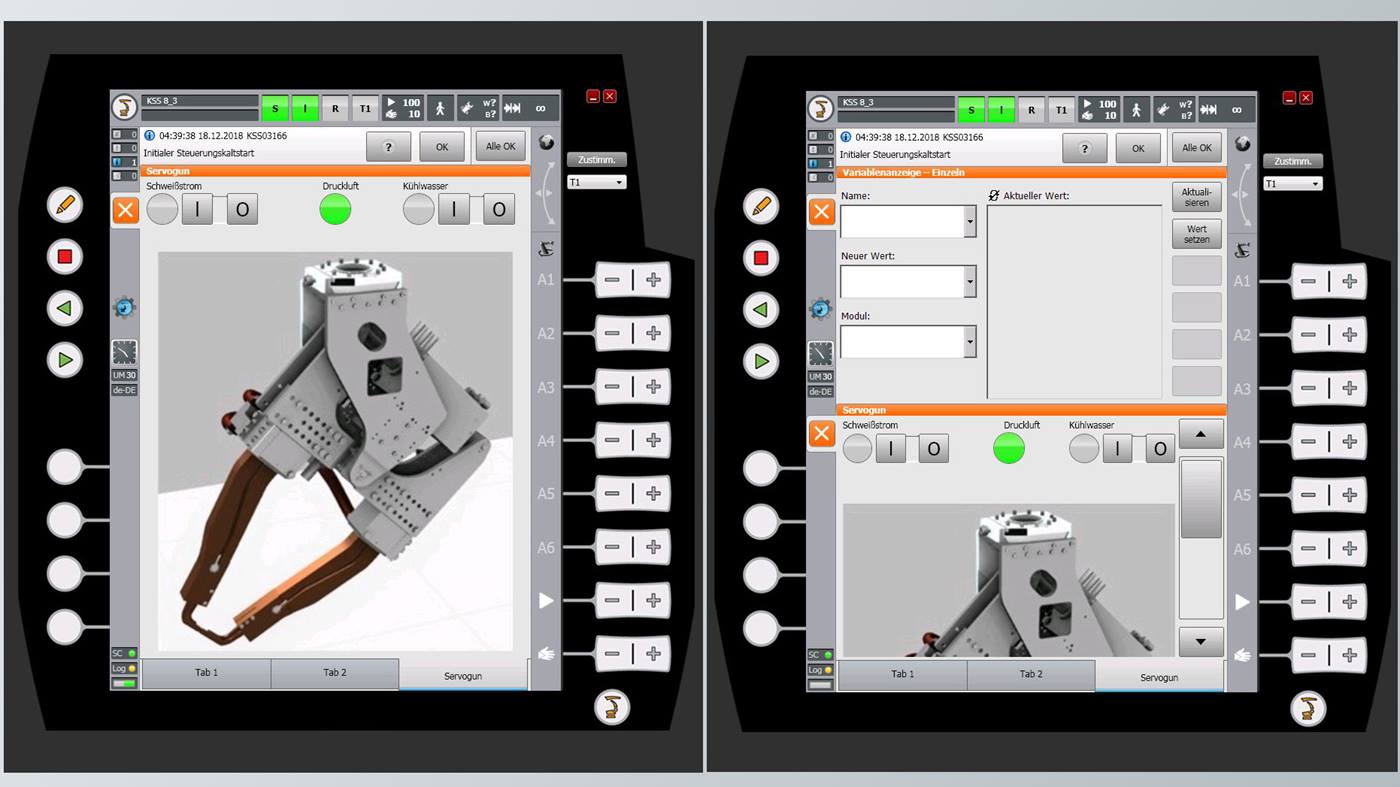
Med tilläggsprogrammet KUKA.HMI zenon kan våra kunder enkelt integrera sin egna programvara i standardanvändargränssnittet på KUKA smartPAD och använda båda samtidigt– utan att påverka funktionen hos handterminalens tryckknappar. Detta möjliggör bland annat:
Styrning av robotaxlarna A1-A6 med tryckknapparna
Anpassning av meddelandefönstret
Användning av andra tilläggsprogram, t.ex. en programeditor eller positionsvisning
Hantering av användarkonton med olika behörighet
Växling mellan halv- och fullskärmsvisning
Fri utformning av indikeringselement, t.ex. knappar och fält
Ändring av landsspecifika enheter
Med tilläggsprogrammet KUKA.HMI zenon installerat kan du fortsätta att styra roboten med pedantens tryckknappar.
KUKA.HMI zenon Runtime: Visualiseringsprogramvara för kunder med höga krav
Med KUKA.HMI zenon Runtime kan våra kunder skräddarsy sin robotmanövrering på ett genomgripande sätt. I fullskärmsläget kan man utöver grafiska anpassningar även göra följande inställningar:
Avaktivera eller konfigurera om tryckknapparna på KUKA smartPAD
Visa och dölja meddelandetexter
Hantera användarkonton med olika behörighet
Fritt utforma indikeringselement, t.ex. knappar och fält
KUKA.HMI zenon Runtime lämpar sig särskilt väl för att visualisera komplexa robotapplikationer.
Programvara för smidig och effektiv robotmanövrering: Visualisering med zenon
Med zenon från COPA-DATA kan våra kunder på ett enkelt sätt designa en skräddarsydd programvarulösning till sina robotapplikationer.
KUKA.HMI zenon Development: Med några få steg konfigureras en programvarulösning för manövrering av robotar
Med engineeringsprogramvaran KUKA.HMI zenon Development kan våra kunder med några få steg designa en skräddarsydd programvarulösning: Användarvänlig drag&drop och fördefinierade templates, designs och funktioner underlättar konfigurationen och tar dig snabbt i mål.
Konfigurera programvara med KUKA.HMI zenon DEV
I editorn bygger man enkelt upp ett eget projekt med hjälp av bilder och mallar.
Överför den färdiga programvaran till robotstyrningen
Den designade programvaran överförs sedan till styrningen som används till robotapplikationen.
Manövrera dina robotar med en av våra anpassbara KUKA.HMI-lösningar
Din alldeles egna KUKA.HMI är redo att användas och äntligen har robotmanövrering blivit riktigt enkel.