Detektera, strukturera, gripa: Så fungerar Bin Picking
Grip tag i delar ur en låda på ett tillförlitligt sätt, utan att stöta emot behållaren: Med teknikpaketet KUKA.SmartBinPicking kan detta nu göras automatiskt. Programvaran i kombination med Vision-detektering från Roboception gör det möjligt för en sexaxlig robot av typen KR AGILUS, KR CYBERTECH eller KR IONTECatt gripa delar från en låda utan kollisioner och singularitet.
Oorganiserade komponenter är inga problem
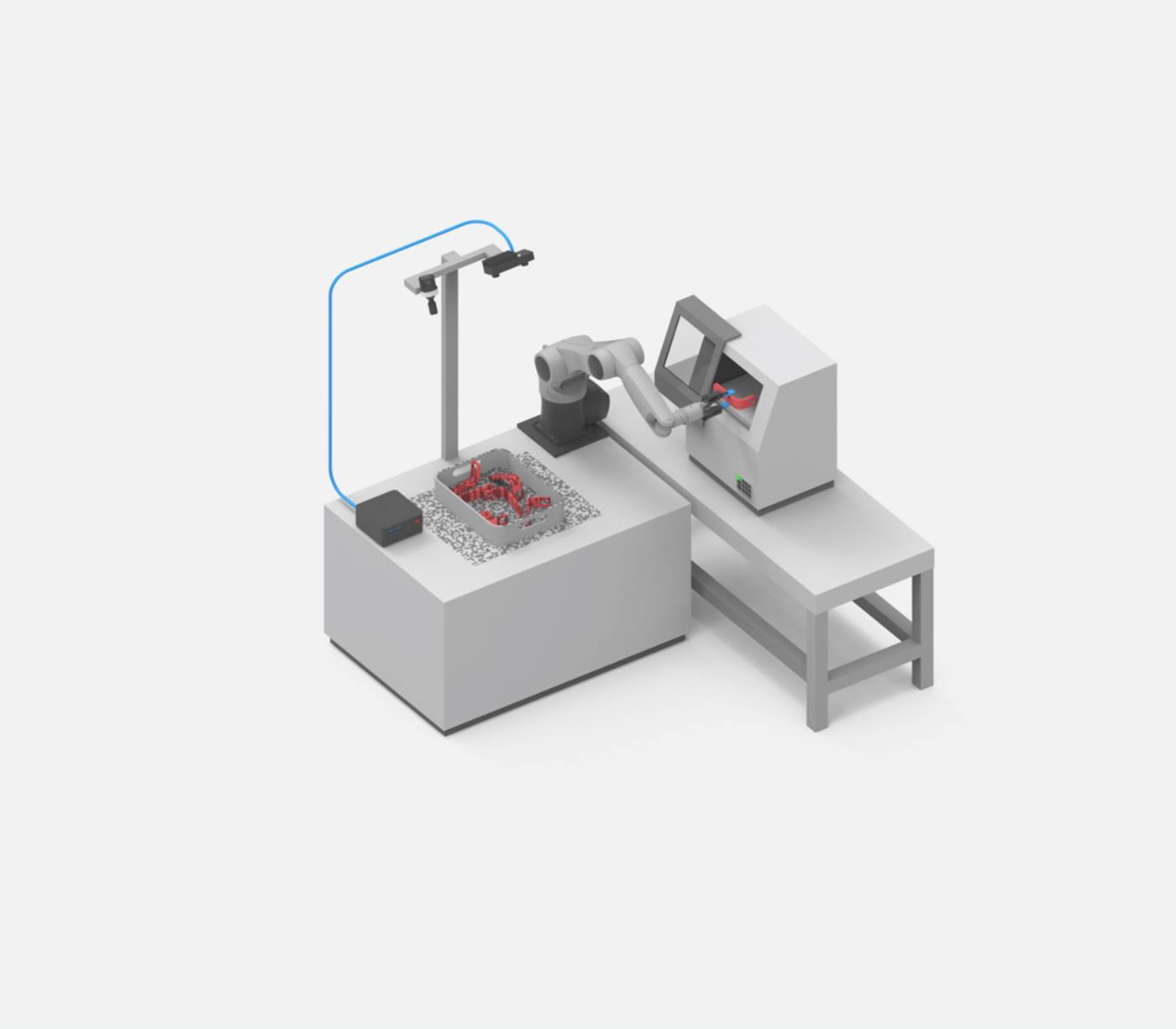
3D-kameran upptäcker och prioriterar de slumpmässigt placerade objekten. Detta innebär: Programvaran strukturerar vilken komponent som är bäst att ta tag i och bestämmer på så sätt en optimal ordningsföljd. Den integrerade banplaneringen beräknar den kollisionsfria banan för Bin Picking, inklusive alla vinklar för att plocka del för del ur lådan. Genom att gripa med den femte axeln, dvs. med robothanden, är det möjligt att få betydligt mer exakta vinklar.
Bana vägen för automatisering och Industrie 4.0
Medan roboten hämtar en del ur lådan med ett mycket exakt grepp planeras nästa bana redan parallellt. Detta förkortar cykeltiderna. Bildbehandlingen från 3D-kameran och banplaneringen utförs på en extern industridator där ett KUKA-plugin är installerat. Kunden får dock ett färdigt programpaket och behöver inte tänka mer på detta. Fullt ös framåt: Nu är det bara att gripa in i lådan och beskåda intelligent Bin Picking i arbete.
Vilken roll spelar artificiell intelligens för objektdetektering?
För att förbereda gripningen i lådan och den intelligenta plockningen så bra som möjligt laddas en CAD-modell in i en fotorealistisk simuleringsmiljö. Där tränas systemet och bilden optimeras för alla krav med hjälp av ett omfattande bibliotek, t.ex. vad gäller färgreaktioner och ljusförhållanden. Denna automatiserade process kan köras över natten så att robotiktillämpningen kan användas nästa dag.