Step three: clarify technology details of the laser welding system
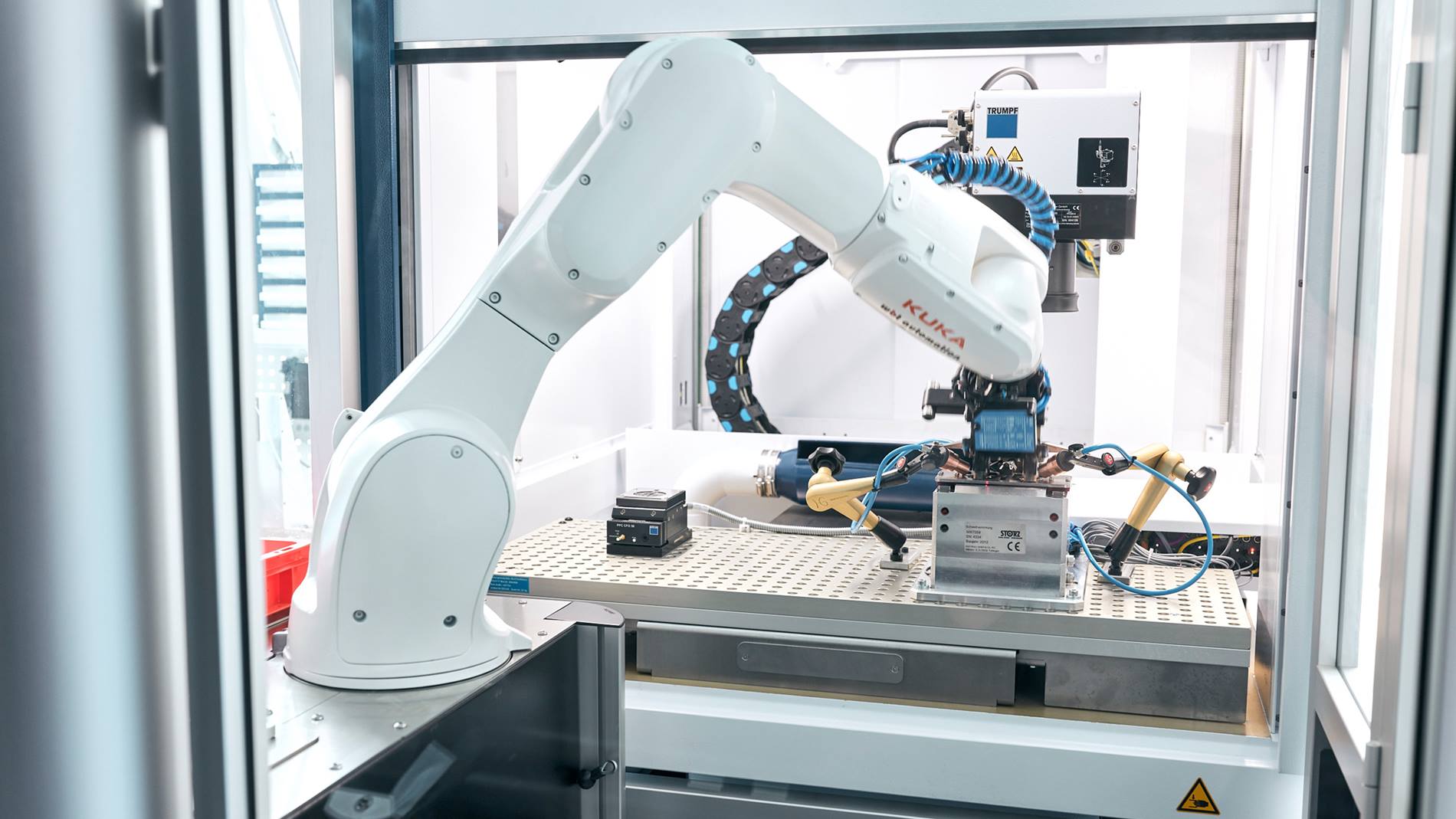
Joachim Burkert described the automation challenges: “We had to accommodate a very large number of workpieces in a confined space with a small robot in a compact cell. Then we had to position and set them down precisely in the welding unit. Because we wanted to grip two workpieces and join them with each motion, we also had to coordinate exactly how the robot would transport the parts.”
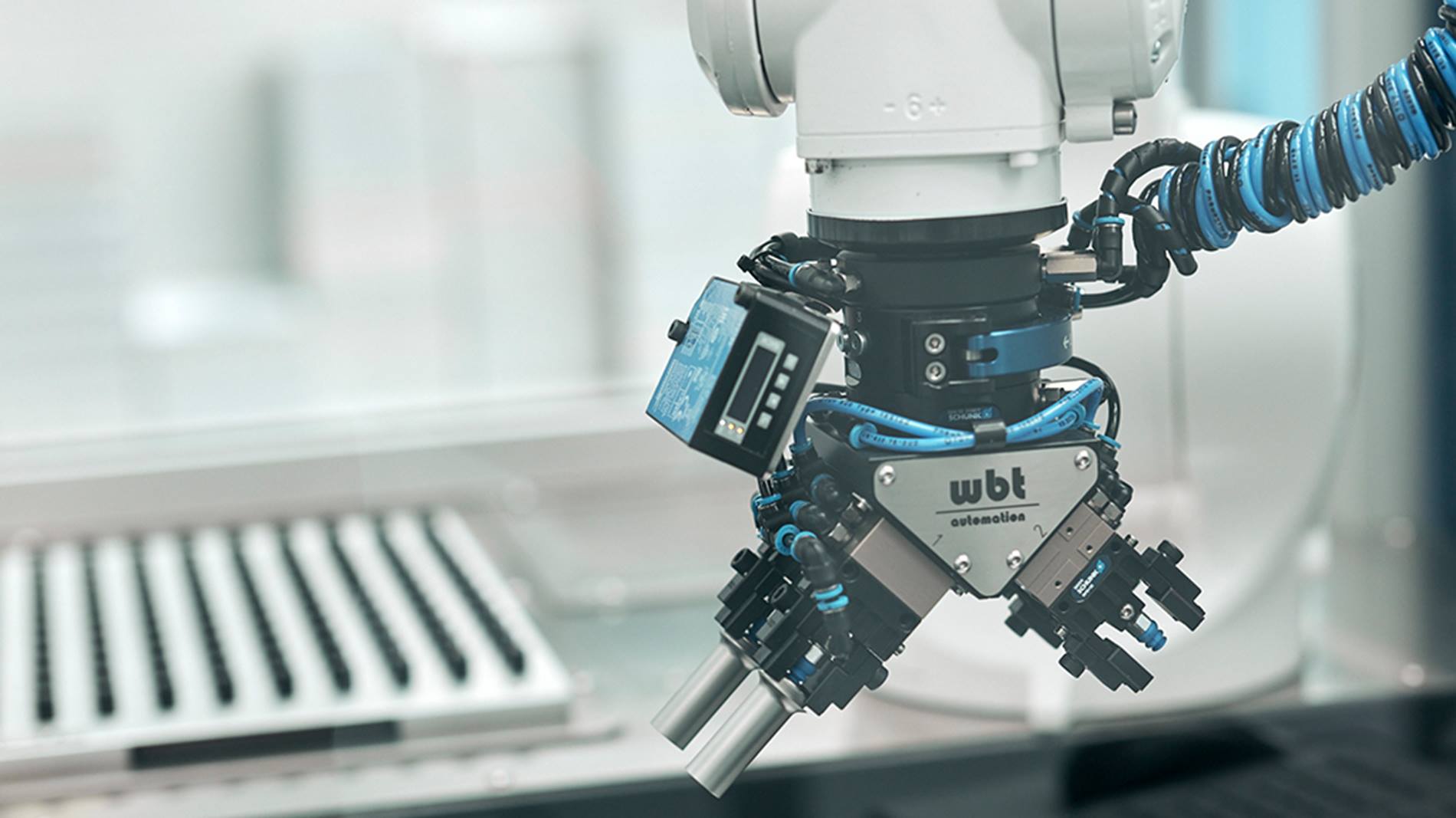
wbt automation relies on KUKA robots for about 98% of its automation projects. “The accuracy required for this project demanded a precisely calibrated robot, not ‘off-the-shelf’ technology. We chose a KR AGILUS of the type KR10 R1100, which went to an extra training camp at KUKA before it came to us.” Now, among other things, it can check the position of the components with its laser sensor system and use a quadruple gripper, as well as a small vacuum bellows, to position each cover glass precisely.