人工智慧輔助學習過程實現 CAD 模型最佳化調整
物件辨識系統會事先在一個逼真的模擬環境中進行訓練。在此過程中,會在顏色反應、材料和照明條件方面對 CAD 模型進行最佳化調整。「每一個要從料箱中抓取的物件都必須提前在這個人工智慧輔助的模擬環境中訓練一段時間。訓練過程可以通宵進行,因此第二天就可以使用該應用」,KUKA 搬運和視覺化產品組合經理 Michael Hohenäcker 說道。透過人工智慧的應用,可以對任意物體的辨識進行最佳化,因此,即使在困難的場景下也能辨識這些物體。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

容器零件抓取技術揀選特定零件:我們的機器人配備了 KUKA.SmartBinPicking 軟體和相關配件,能夠完美執行這類任務。自動化解決方案如今首次以視覺化套裝軟體工具的形式供應,讓自動化技術能夠更簡單地整合到生產過程中。
2022年10月6日
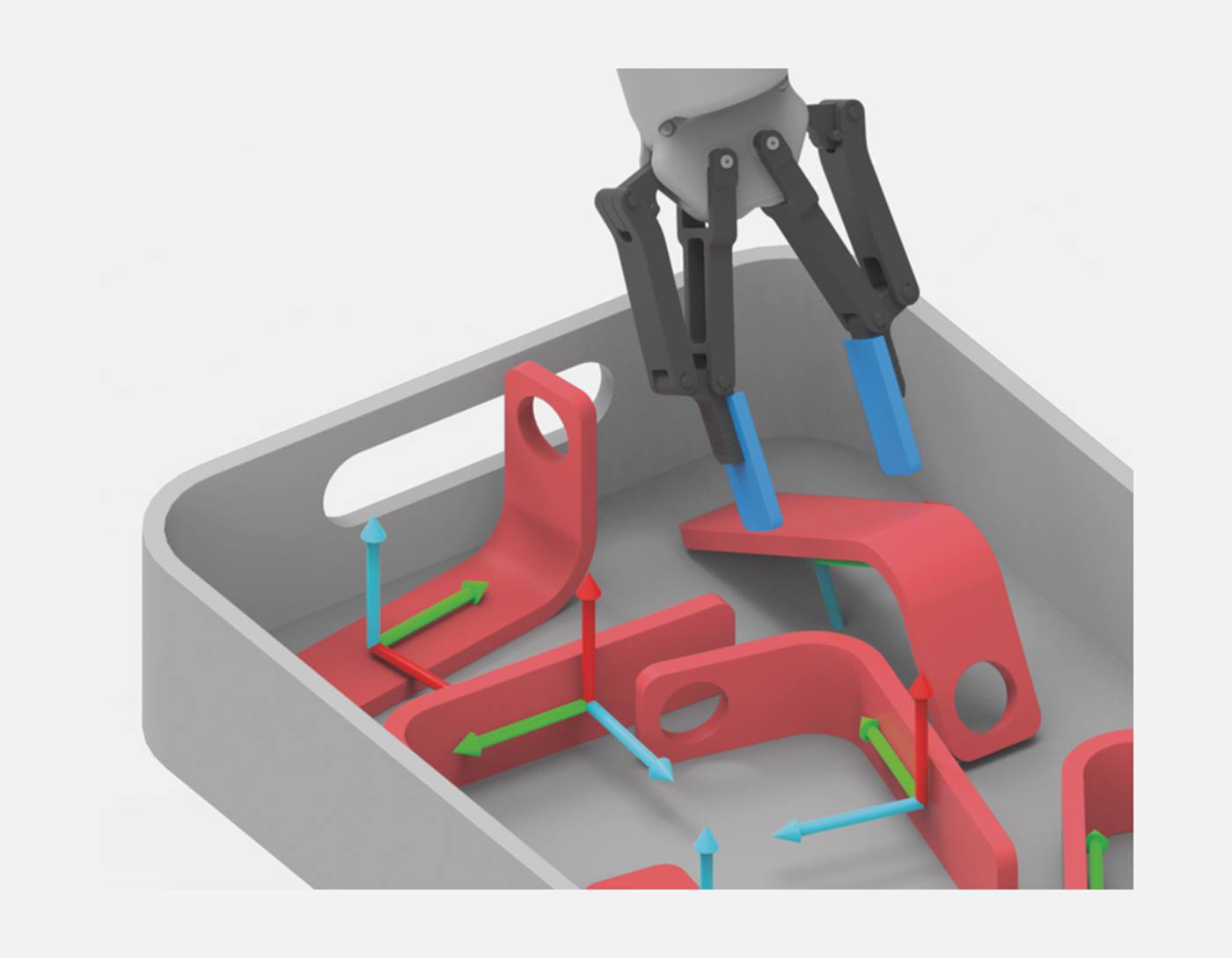
一般而言,將手伸入容器中取出一根螺栓,且手臂不會撞到容器邊緣,對於人類而言並不是什麼挑戰。但對於機器人來說,則截然不同。為了讓機器人以正確的角度將機械臂伸進料箱中,從中抓取正確的零件,必須事先規劃好精確的運動軌跡。如此一來,機器人才得以完成箱中取物,以可靠又快速的方式替代人類從事那些枯燥、單調的工作,而且完全不知疲倦。為了精確計算機器人的運動軌跡和抓取時的角度,KUKA 與視覺專家 Roboception 共同開發了一款製程套裝軟體,可以無需花費過多的程式設計工作就將其整合到生產流程中。
製程套裝軟體中包含了 Roboception 的 3D 攝影機系統,可將環境和待取出物體的圖像發送至電腦,以規劃無奇點的最佳軌跡。此處將計算出機械臂至需抓取物體的確切路徑,其中也會將機器人結構和夾爪的數據納入計算過程。KUKA.SmartBinPicking 軟體可計算出從料箱中抓取工件的最高效路徑,並且也會確保機械臂不會發生碰撞。這樣的零碰撞軌跡規劃有助於讓停機時間減少到最低限度。此外,在辨識物件時,無論物件是否有固定的排列順序,軟體還會替機器人安排好應優先抓取哪些零件,例如因為物體疊放在最上方。
物件辨識系統會事先在一個逼真的模擬環境中進行訓練。在此過程中,會在顏色反應、材料和照明條件方面對 CAD 模型進行最佳化調整。「每一個要從料箱中抓取的物件都必須提前在這個人工智慧輔助的模擬環境中訓練一段時間。訓練過程可以通宵進行,因此第二天就可以使用該應用」,KUKA 搬運和視覺化產品組合經理 Michael Hohenäcker 說道。透過人工智慧的應用,可以對任意物體的辨識進行最佳化,因此,即使在困難的場景下也能辨識這些物體。

搭配 KUKA.SmartBinPicking,客戶將獲得一個製程套裝軟體,可用於簡單且高效地控制容器中取物動作。

此外,透過與 Roboception 合作,KUKA 成功地將軌跡規劃轉移到外部電腦,因而不需要佔用機器人控制器的資源。這具有一定的優勢:「即使在機器人執行料箱中取物期間,也會同時計算下一個軌跡規劃」,Hohenäcker 解釋說。這樣不僅可以縮短週期時間,客戶在整合該解決方案時也節省了時間。由於採用了現代化網路技術進行組態設定,客戶可以在 3D 模型中查看其確切情況,並非常輕鬆地掌握系統中的規定。這只需要具備機器人基礎知識即可,而不需要深入的程式設計經驗。


