機器人感應器介面有助於簡化複雜的感測器應用
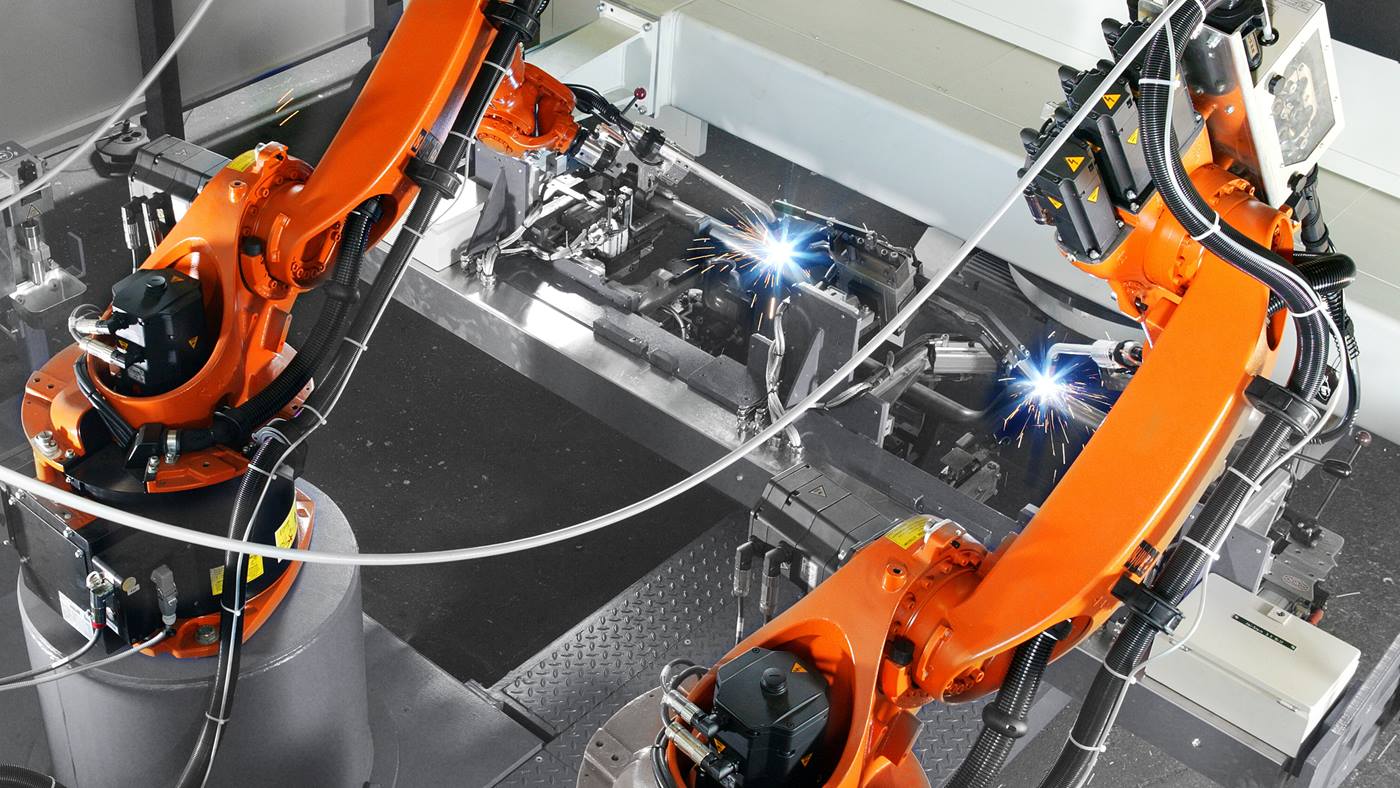
KUKA.RobotSensorInterface (RSI) 是一套製程套裝軟體,用於落實需要週期性信號處理和對機器人運動需要發揮高性能週期性影響的應用,例如研磨、拋光、去毛刺等各種作業。製程套裝軟體 RSI 除了包含應用開發所需的工程工具之外,也為工業機器人的控制器提供應用程式在試運轉和執行時所需的軟體元件。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果
這套軟體的作用為工業機器人和其感測系統之間的通訊介面,讓您能夠輕鬆高效地為複雜的感測器應用進行全面化的程式設計。
KUKA.RobotSensorInterface (RSI) 是一套製程套裝軟體,用於落實需要週期性信號處理和對機器人運動需要發揮高性能週期性影響的應用,例如研磨、拋光、去毛刺等各種作業。製程套裝軟體 RSI 除了包含應用開發所需的工程工具之外,也為工業機器人的控制器提供應用程式在試運轉和執行時所需的軟體元件。
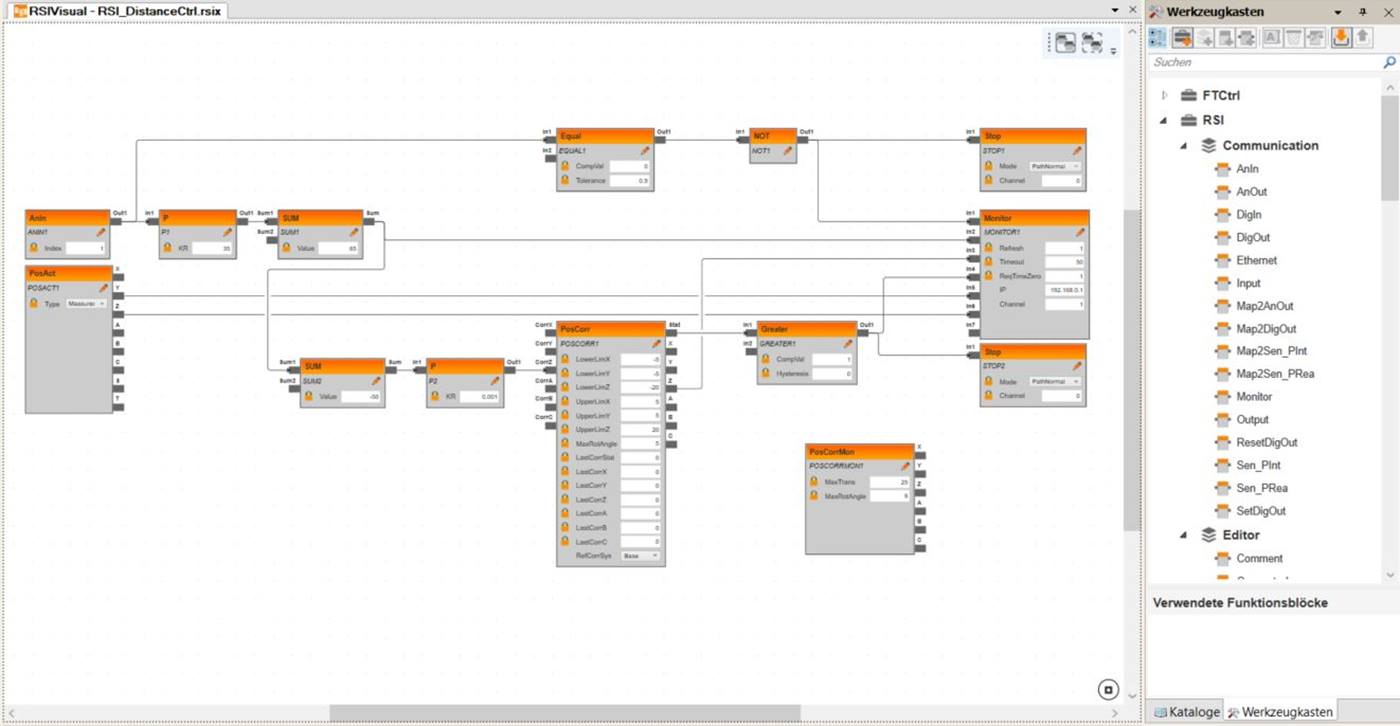
利用圖形編輯器 RSIVisual,可以非常便利地為敏感應用的信號處理進行程式設計。此外,還可透過 RSI 工具箱裡的 RSI 對象讀入相連感測器的週期測量數據,並予以進一步處理。所得到的結果可以用於控制機器人的動作。編輯器具有多種功能,其中包括:
設定專屬的功能塊
實現任何所需的功能性
WorkVisual 工程設計軟體套件內建 RSIVisual 完整程式設計功能
工具箱包含超過 75 種圖形程式設計 RSI 對象