Používáte starší verzi prohlížeče Internet Explorer. Pro optimální zobrazení si prosím svůj prohlížeč aktualizujte
KUKA.RobotSensorInterface
Software slouží jako rozhraní pro komunikaci mezi průmyslovým robotem a jeho senzorovým systémem a umožňuje programování náročných senzorových aplikací jednoduchým, univerzálním a efektivním způsobem.
Robot Sensor Interface zjednodušuje náročné senzorové aplikace
KUKA.RobotSensorInterface (RSI) je softwarový technologický balíček pro implementaci aplikací, které vyžadují cyklické zpracování signálu a vysoce výkonné, cyklické ovlivňování pohybu robota, jako například broušení, leštění, odjehlování a mnoho dalšího. Technologický balíček RSI obsahuje jak inženýringové nástroje potřebné pro vývoj aplikace, tak softwarové komponenty potřebné pro zprovoznění a spuštění aplikace pro řízení průmyslového robota.
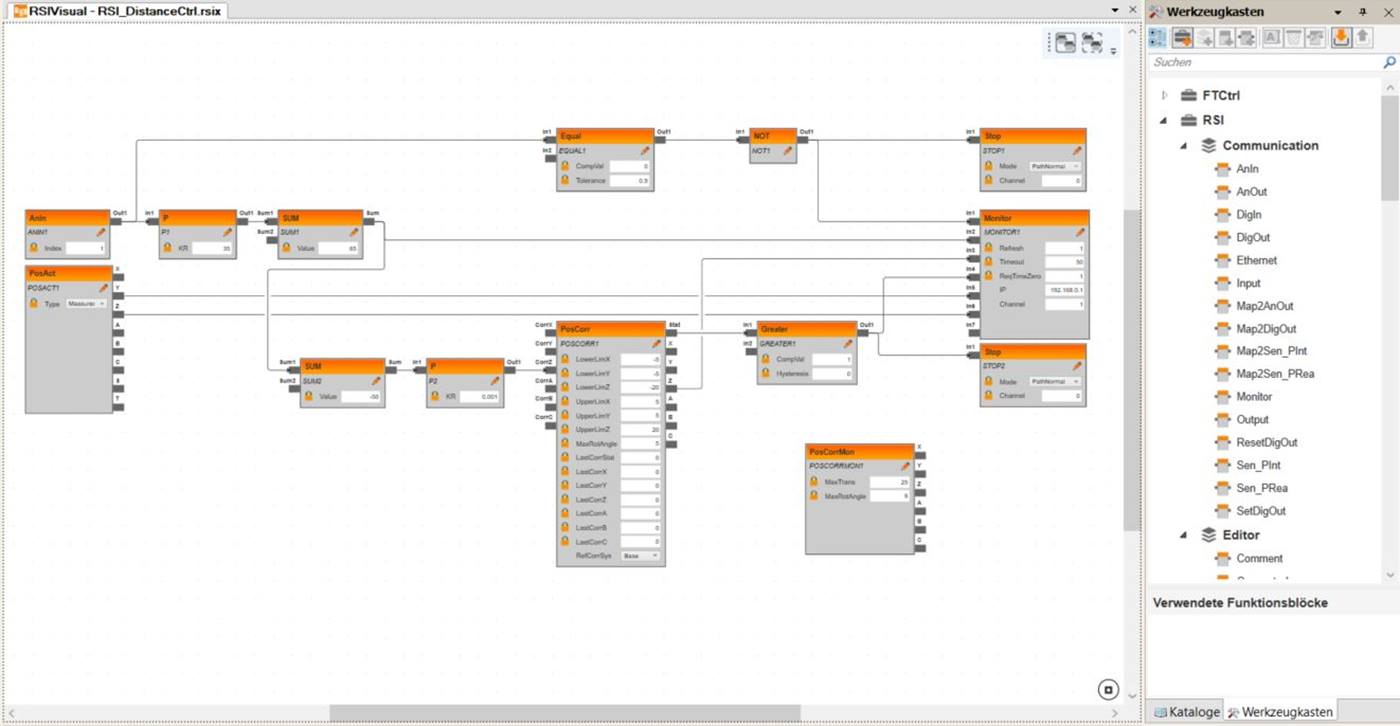
Editor RSIVisual – jednoduché grafické programování
S grafickým editorem RSIVisual lze velmi jednoduchým způsobem programovat zpracování signálu citlivé aplikace. Cyklické naměřené hodnoty z připojených senzorů lze načítat a dále zpracovávat prostřednictvím objektů RSI z toolboxu RSI. Výsledek lze použít k ovlivnění pohybu robota. Editor má k dispozici řadu funkcí, včetně:
Tvorby vlastních funkčních bloků
Realizace libovolné požadované funkčnosti
Kompletního programování přes nástroj RSIVisual integrovaný v inženýringovém prostředí WorkVisual
Toolboxu s více než 75 objekty RSI pro grafické programování
Pomocí snímače vzdálenosti na přírubě robota lze například udržovat požadovanou vzdálenost k povrchu součásti bez ohledu na naprogramovanou dráhu.
Hladká integrace a jednoduchý přehled o komplexních aplikacích – vaše výhody:
Pracuje s téměř všemi roboty KUKA a externími osami
Bezproblémová integrace s KUKA.ForceTorqueControl v aplikacích RSI
Lze použít i při výrobě na montážní lince
Nejlepší výkon ve své třídě
Zpracování v reálném čase do 4 ms
Multifunkční rozhraní
Bezproblémová integrace do nástroje KUKA.WorkVisual
Pokryjeme všechny vaše požadavky
Integrace KUKA.RobotSensorInterface mnohonásobně rozšíří aplikace vašeho průmyslového robota. Od manipulace přes montáž až po kontrolu, váš průmyslový robot může být použit téměř v každé oblasti.
Výhody
Broušení a odjehlování
Rozměrově přesné odjehlování a broušení součástí
Manipulace
Řízení robota pomocí joysticku
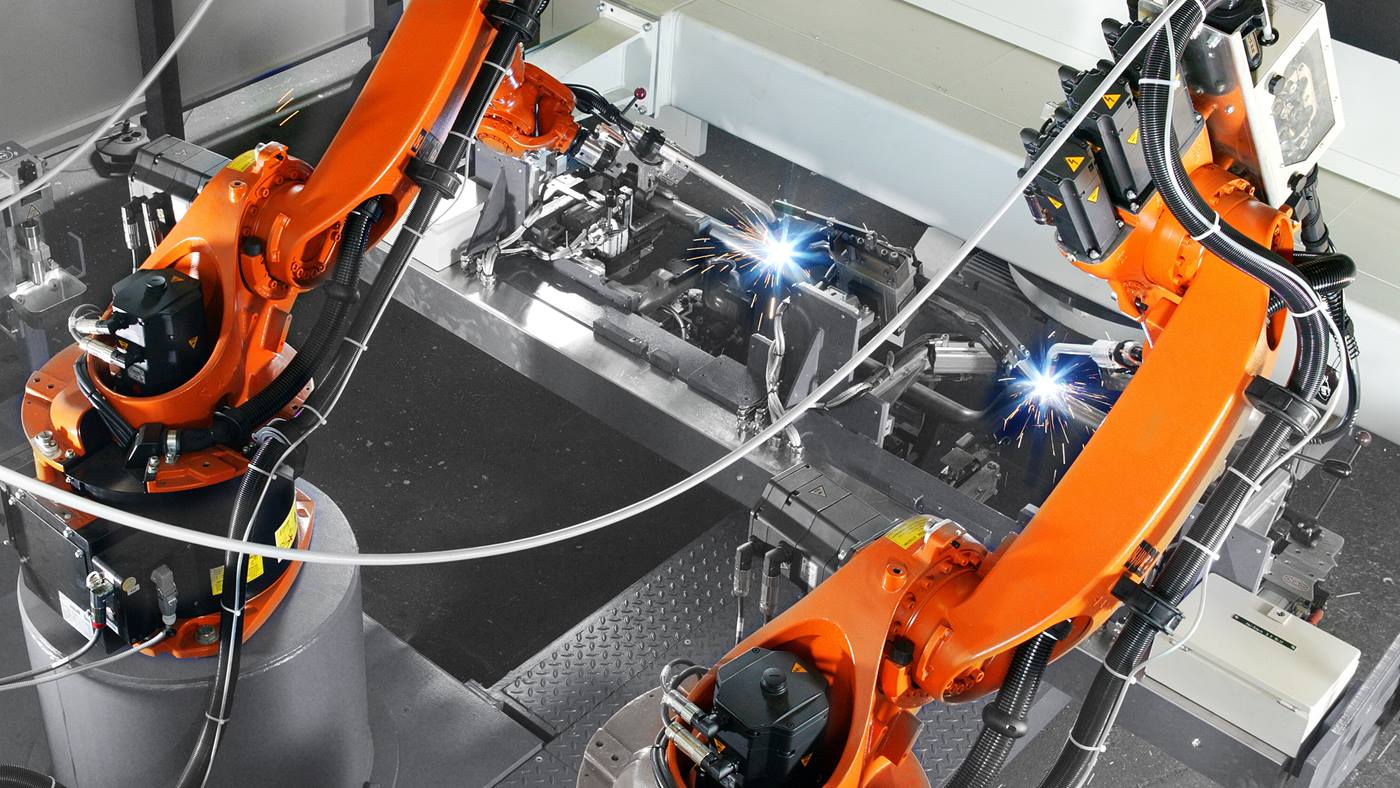
Svařování
Sledování svaru na základě dat z procesu svařování
Montáž
Silově řízené spojování součástí
Leštění
Měření aplikované síly a řízení dráhy robota v reálném čase
Kontrola a inspekce
Hmatové testování je velmi užitečné pro různé typy produktů: sedadla, volanty, spínače, páky a tlačítka
Přenos dat
Přenos dat z robota a aplikace v reálném čase do externího systému
Vytvořte vlastní senzorovou „aplikaci“!
Využijte své know-how k řešení procesů a rozhraní KUKA.RobotSensorInterface ve spojení s inženýringovým prostředím KUKA.WorkVisual a KUKA.Optionpackageeditorem a nabídněte svým zákazníkům vaše řešení jako plnohodnotnou „aplikaci“ KUKA.
Všechny důležité informace jsou Vám kdykoli k dispozici
Chcete-li získat přehled o různých verzích a dokumentacích nebo zkontrolovat dostupnost RSI, navštivte KUKA Marketplace. Rychle se zaregistrujte na my.KUKA a získejte okamžitý přístup ke všem informacím.