
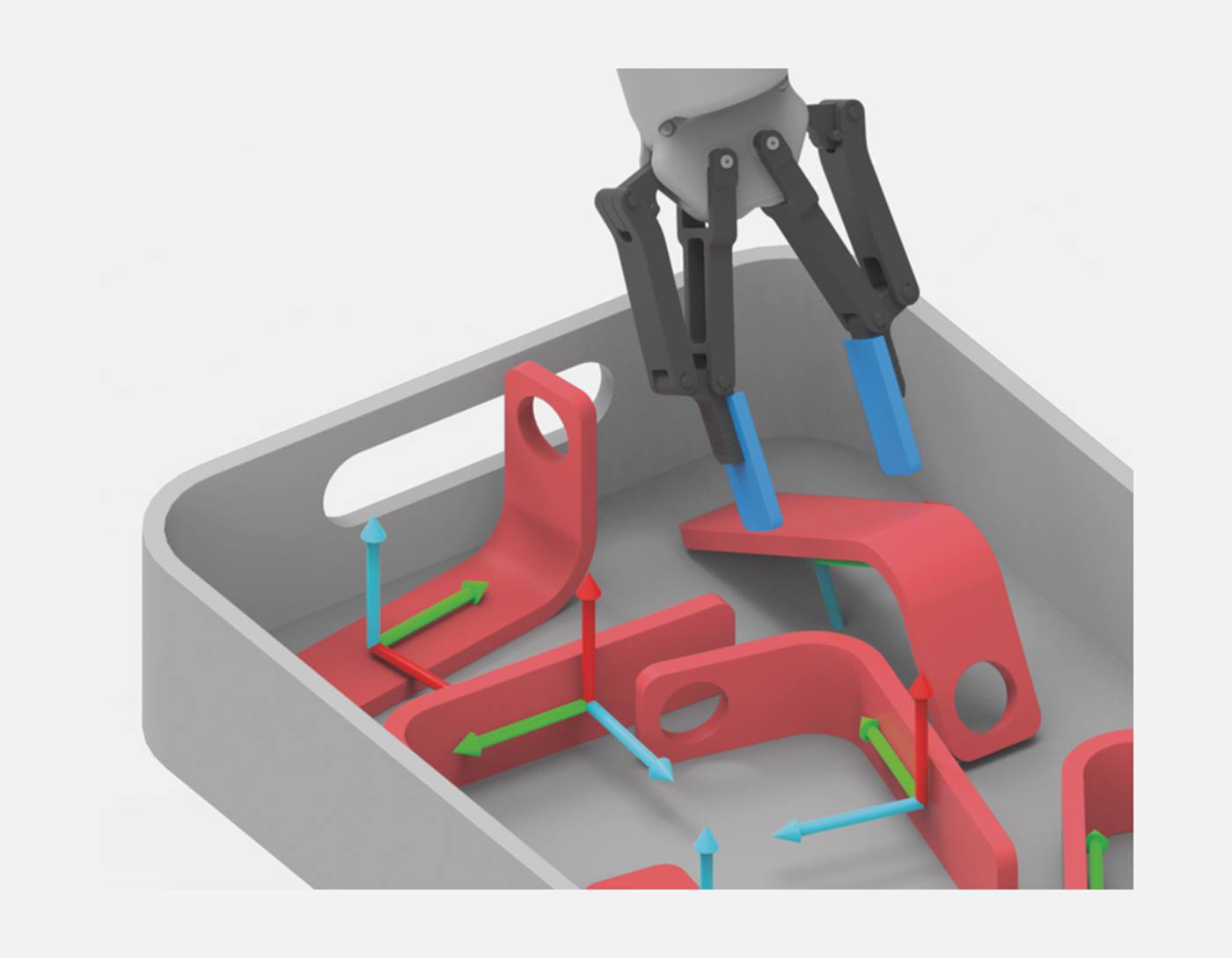
AIによる学習プロセスでCADモデルの最適化を実現
物体認識は、フォトリアリスティック・シミュレーション環境で事前に訓練されます。ここでは、色の反応や素材、照明条件などを考慮して、CADモデルを最適化します。「箱からつかむべき全ての物体は、この人工知能をサポートしたシミュレーション環境の中で、あらかじめ一定期間訓練されています。このトレーニングは夜間に行われ、翌日からアプリケーションが使用できるようになります」とKUKAのハンドリング&ビジョン部門のポートフォリオマネージャーであるミヒャエル・ホーエンエッカー氏は述べています。AIを活用することで、あらゆる対象物に対する認識を最適化し、困難な場面でも識別できるようになります。




