Korzystasz ze starszej wersji przeglądarki Internet Explorer. Aby zapewnić optymalnie działanie, zaktualizuj przeglądarkę
KUKA.RoboTeam
Dzięki KUKA.RoboTeam w jednym zespole mogą pracować jednocześnie maksymalnie cztery roboty. Dodatkowo roboty mogą zsynchronizować kinematyki osi dodatkowych np. nastawniki obrabianych przedmiotów lub osie liniowe robotów, aby wykonywać dopasowane czasowo i geometrycznie ruchy.
Sprzężenie czasowe i geometryczne dzięki oprogramowaniu KUKA.RoboTeam
Sprzężenie czasowe robotów
Za pomocą oprogramowania KUKA.RoboTeam werden klasyczne, centralne funkcje PLC, takie jak blokady obszarów roboczych lub synchronizacja programów, są przejmowane bezpośrednio dla grupy robotów. W ten sposób wszystkie zadania, które dotyczą bezpośrednio grupy robotów, są przez nie przejmowane niezależnie.
Sprzężenie geometryczne robotów
Geometryczne sprzężenie toru i transportu kilku robotów jest powiązane z różnymi procesami. Umożliwia ono nowoczesną produkcję taśmową i gwarantuje znaczne skrócenie czasu taktowania. W ten sposób geometrycznie sprzężone roboty z bardzo dużą elastycznością wykonują wszystkie zadania manipulacyjne w zakresie transportu dużych obciążeń i gwarantują optymalne umieszczenie zwłaszcza niestabilnych elementów obrabianych. Za pomocą tej funkcji można również realizować procesy równocześnie z transportem materiałów.
Dwa roboty KUKA podczas manipulowania bardzo ciężkimi elementami z płaskiego szkła.
KUKA.RoboTeam: Funkcje dla sprzężenia czasowego i geometrycznego robotów
Sprzężenie czasowe robotów
Synchronizacja programów: Zsynchronizowane rozpoczynanie ruchu dwóch lub więcej robotów
Synchronizacja ruchów: Zsynchronizowany czas ruchu dwóch lub więcej robotów
Sprzężenie geometryczne robotów lub robotów i kinematyki osi dodatkowej
Procedura rozkładu obciążenia: Zsynchronizowana praca dwóch lub więcej robotów
Procedura zależna od procesu: Współpraca dwóch lub więcej robotów w jednym procesie
Procedura łączona: Kombinacja procedury podziału obciążenia i procedury zależnej od procesu
Rozszerzona zasada master-slave: Zsynchronizowana praca dwóch lub więcej robotów z kinematyką osi dodatkowej
W KUKA.RoboTeam wydawanie poleceń dotyczących synchronizacji odbywa się za pośrednictwem interfejsu programistycznego robota.
Zmiany toru i prędkości jednego robota w grupie oddziałują na wszystkie pozostałe roboty grupy, nie powodując przy tym opóźnień.
Wszystkie sygnały istotne dla bezpieczeństwa są od razu przekazywane w ramach grupy robotów przez wewnętrzne magistrale bezpieczeństwa.
Zatrzymanie awaryjne (kategoria zatrzymania 1) dowolnego robota powoduje zsynchronizowane hamowanie całej grupy zgodne z przebiegiem toru.
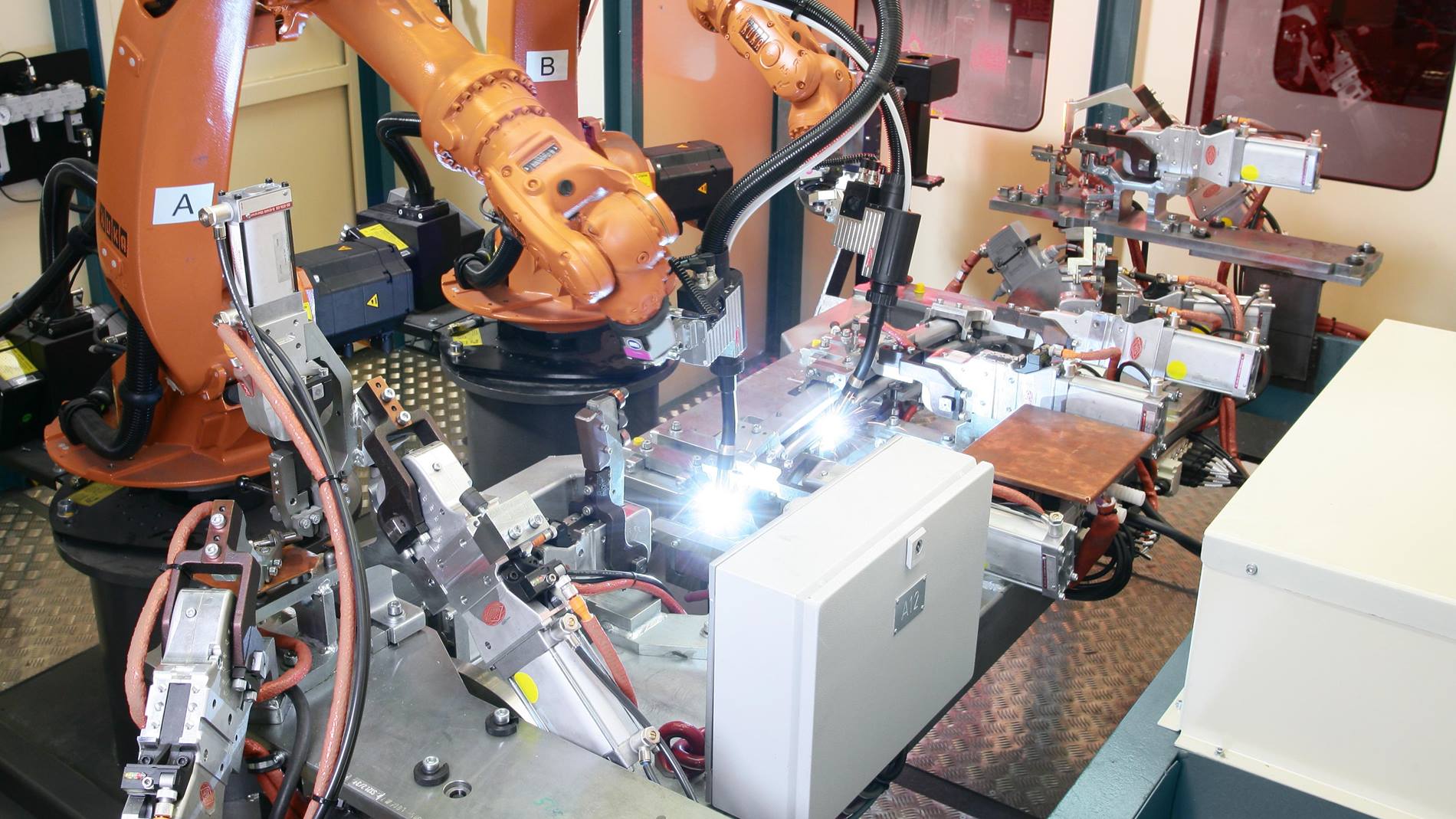
Dzięki oprogramowaniu KUKA.RoboTeam dwa roboty KUKA mogą jednocześnie spawać podzespoły.