From Delta to Scara: Overview of industrial robot types
Hundreds of thousands of robots are in operation around the world every day. Their appearance is as varied as their tasks. Here we present a few of the most important representative types.
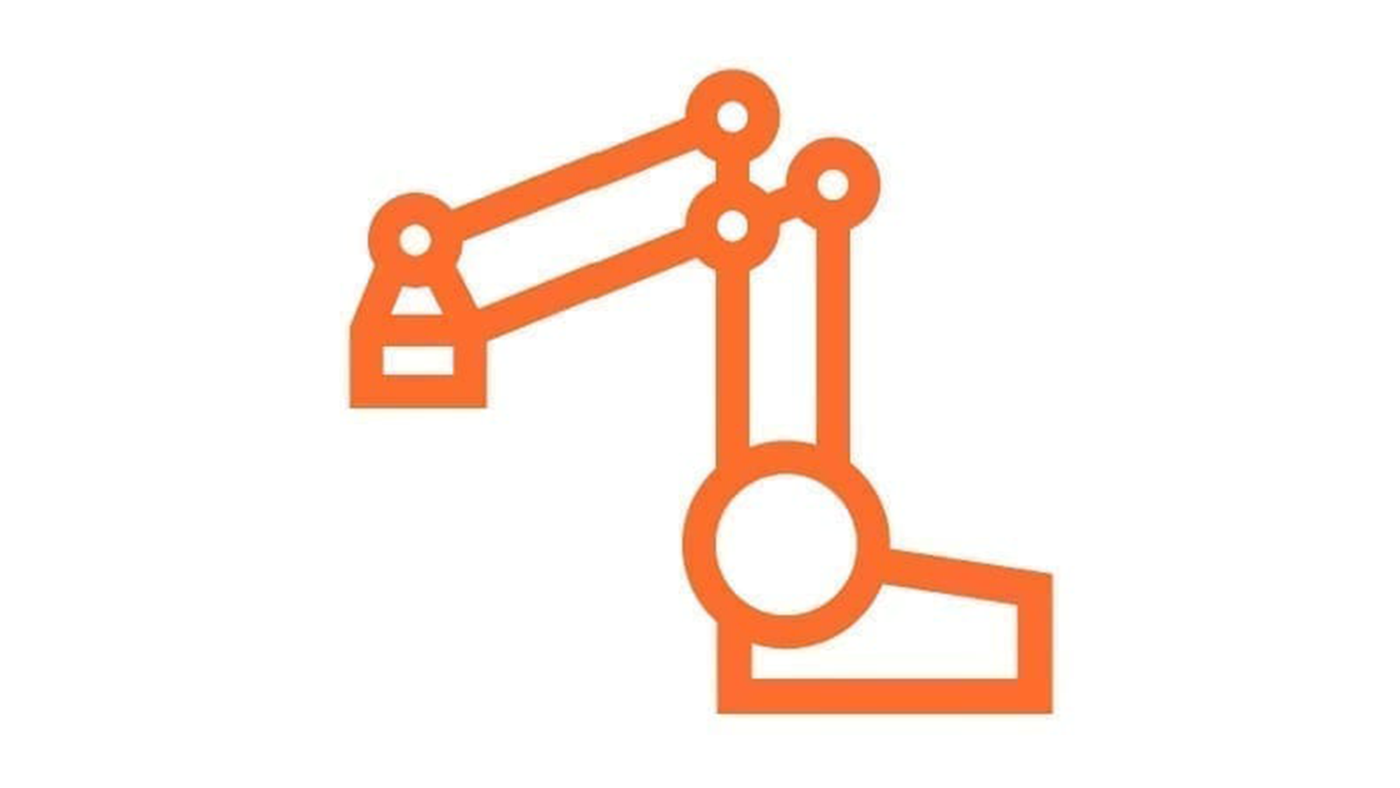
ARTICULATED
The archetypal robots in industrial manufacturing, articulated robots have rotational main axes and can thus generally move freely in space. The most widespread design has six axes, while a seventh axis basically enables the robot to ‘work around the corner’.
In order to extend the working range still further, it can be mounted on a linear axis, thus covering longer distances or serving multiple work stations. Articulated robots – including dual-arm systems – are primarily used for flexible tasks, particularly ones involving complex motion sequences. The robot can perform a wide range of tasks, such as assembly, palletization, spot welding or painting.

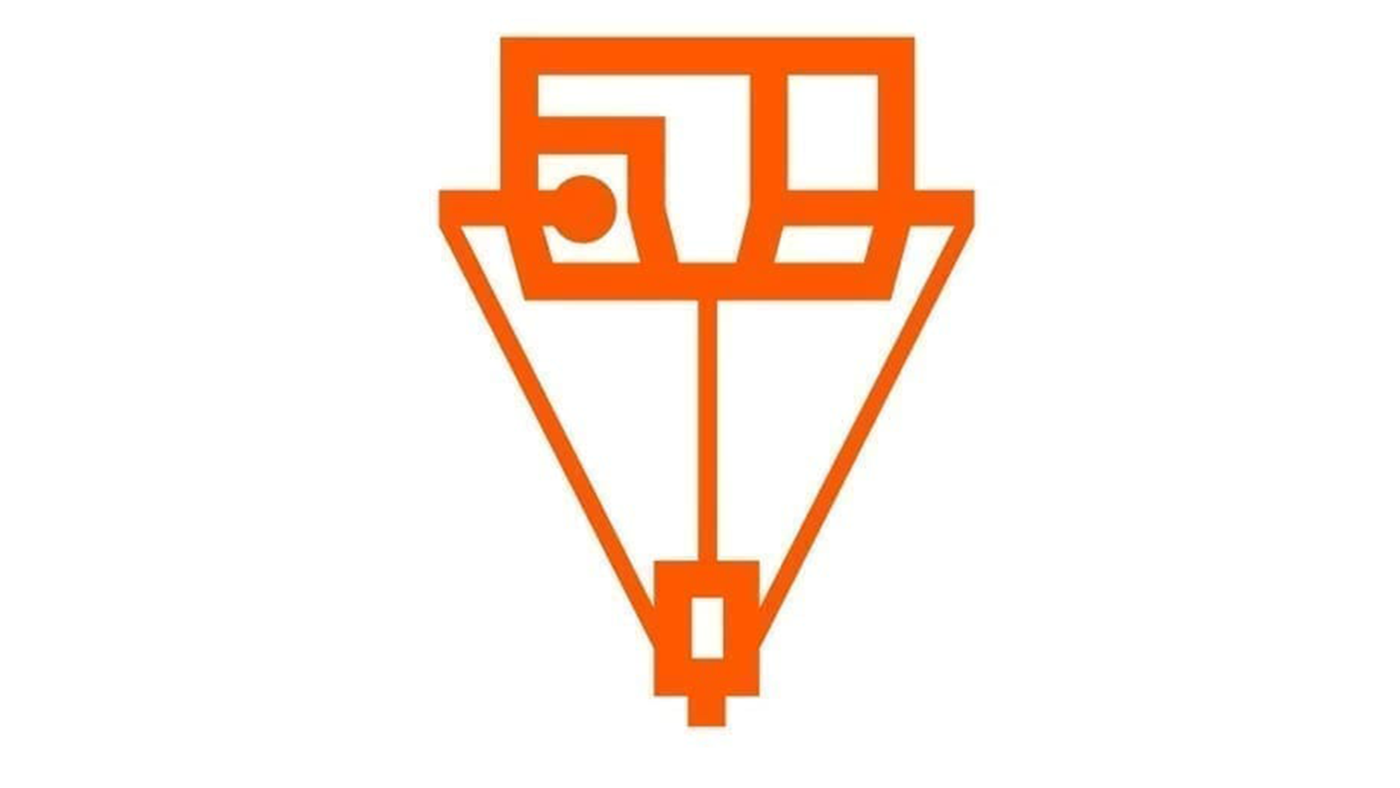
DELTA
The shape of these robots is reminiscent of the Greek letter delta. They are parallel arm robots with tripod kinematics and their arms are connected to universal joints at the base. A key feature of delta robots is that their main drives are fixed on the frame. Moreover, they generally have three or four degrees of freedom. The base of the robot is mounted above the moving parts, i. e. suspended from the ceiling.
The jointed arms – at least three – start here and are connected to a small triangular platform at the other end. Delta robots are fast and light and are thus frequently used for packaging and assembly tasks and in high-speed applications. Thanks to their precision, they are suitable for pick-and-place tasks, while their speed means that they are also suited to very high-volume applications in the pharmaceutical industry.
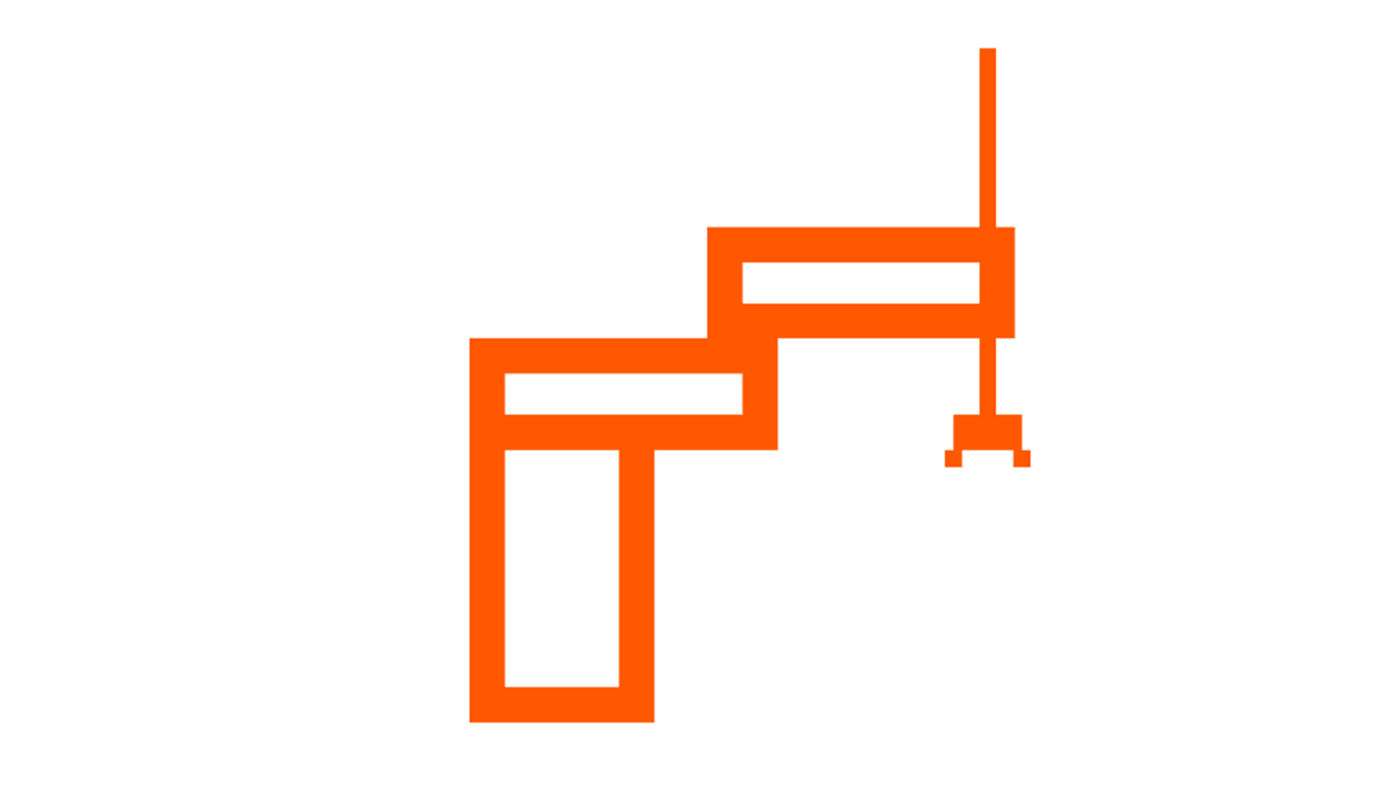
SCARA
At the end is the vertical and rotational Z axis on which a gripper can be mounted. Typical tasks are horizontal transfer and vertical joining. The robust robots can be installed on the floor, wall or ceiling. SCARA robots require little space and have high repeatability. However, they can only be used for low payloads and a small workspace.
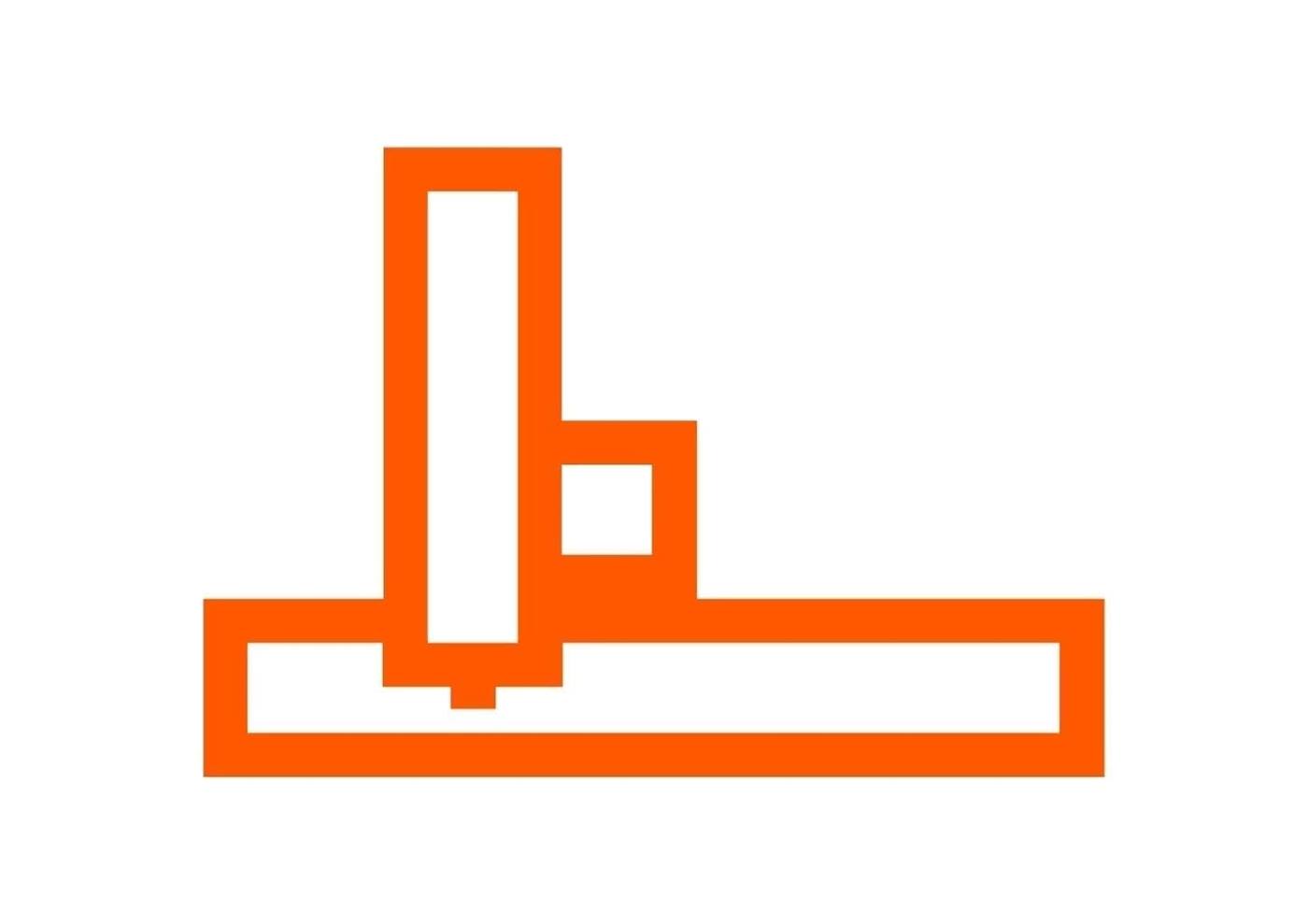
GANTRY
Gantry robots can transfer loads over long distances and position them with great precision. Smaller versions of gantry robots also exist in pick-and-place machines. Gantry robots load machines from above, for example via loading hatches – so the machine remains accessible. Different gantry robot variants are available.The simplest variant is the linear gantry.
Here, the points to which the gripper can be moved are located in a single axis. The gantry arm is responsible for the vertical motions while a gantry slide performs the horizontal motions. If a perpendicular motion is also required, a cantilever gantry is used. A Cartesian gantry robot can cover large areas.
PALLETIZING ROBOT