Du använder en äldre version av webbläsaren Internet Explorer. För en så bra upplevelse som möjligt bör du uppdatera din webbläsare.
KUKA.RoboTeam
KUKA.RoboTeam möjliggör samarbetande drift av upp till fyra robotar i grupp. Robotarna kan även synkroniseras med externa axelkinematiker som lägesställare för arbetsstycken eller robotlinjärenheter för att kunna utföra tids- och geometrianpassade rörelser.
Tids- och geometrimässig sammankoppling med programvaran KUKA.RoboTeam
Synkronisering av robotar
Med programvaran KUKA.RoboTeam flyttas klassiska, centrala PLC-funktioner som arbetsområdesförreglingar och programsynkronisering direkt till robotgruppen. Alla uppgifter som direkt berör robotgruppen kommer då att utföras av denna grupp helt autonomt.
Geometrisk sammankoppling av robotar
Den geometriska ban- och transportkopplingen av flera robotar integreras med olika processer. Detta möjliggör en modern löpande bandproduktion och garanterar kraftigt förkortade cykeltider. Geometriskt sammankopplade robotar kan till exempel lösa alla hanteringsuppgifter inom tunglasttransporter på ett mycket flexibelt sätt och positionera arbetsstycken på processoptimerat sätt – särskilt arbetsstycken som inte är formstabila. Med hjälp av denna funktion kan även processer appliceras parallellt med materialtransporten.
Två KUKA-robotar som hanterar extremt tunga planglaskomponenter.
KUKA.RoboTeam: Funktioner för tidsrelaterad och geometrisk sammankoppling av robotar
Synkronisering av robotar
Programsynkronisering: Synkroniserad rörelsestart av två eller fler robotar
Rörelsesynkronisering: Synkroniserad rörelsetid för två eller fler robotar
Geometrisk sammankoppling av robotar eller av robotar och en extern axelkinematik
Lastdelningsförfarande: Synkront arbete med två eller fler robotar
Processberoende förflyttning: Samarbete mellan två eller fler robotar i en och samma process
Kombinerad förflyttning: Kombination av lastdelningsförfarande och processberoende förflyttning
Utökad master-slave-princip: Synkront arbete med två eller fler robotar med extern axelkinematik
Synkroniseringskommandona i KUKA.RoboTeam sätts via robotens programmeringsgränssnitt.
När robotens bana eller hastighet ändras i gruppen verkställs detta på alla robotar i gruppen utan fördröjning.
Alla säkerhetsrelevanta signaler kommuniceras direkt inom robotgruppen via det interna säkerhetsbussystemet.
Ett nödstopp (stopp av kategori 1) på en av de deltagande robotarna ger upphov till en synkroniserad och bantrogen bromsning av hela gruppen.
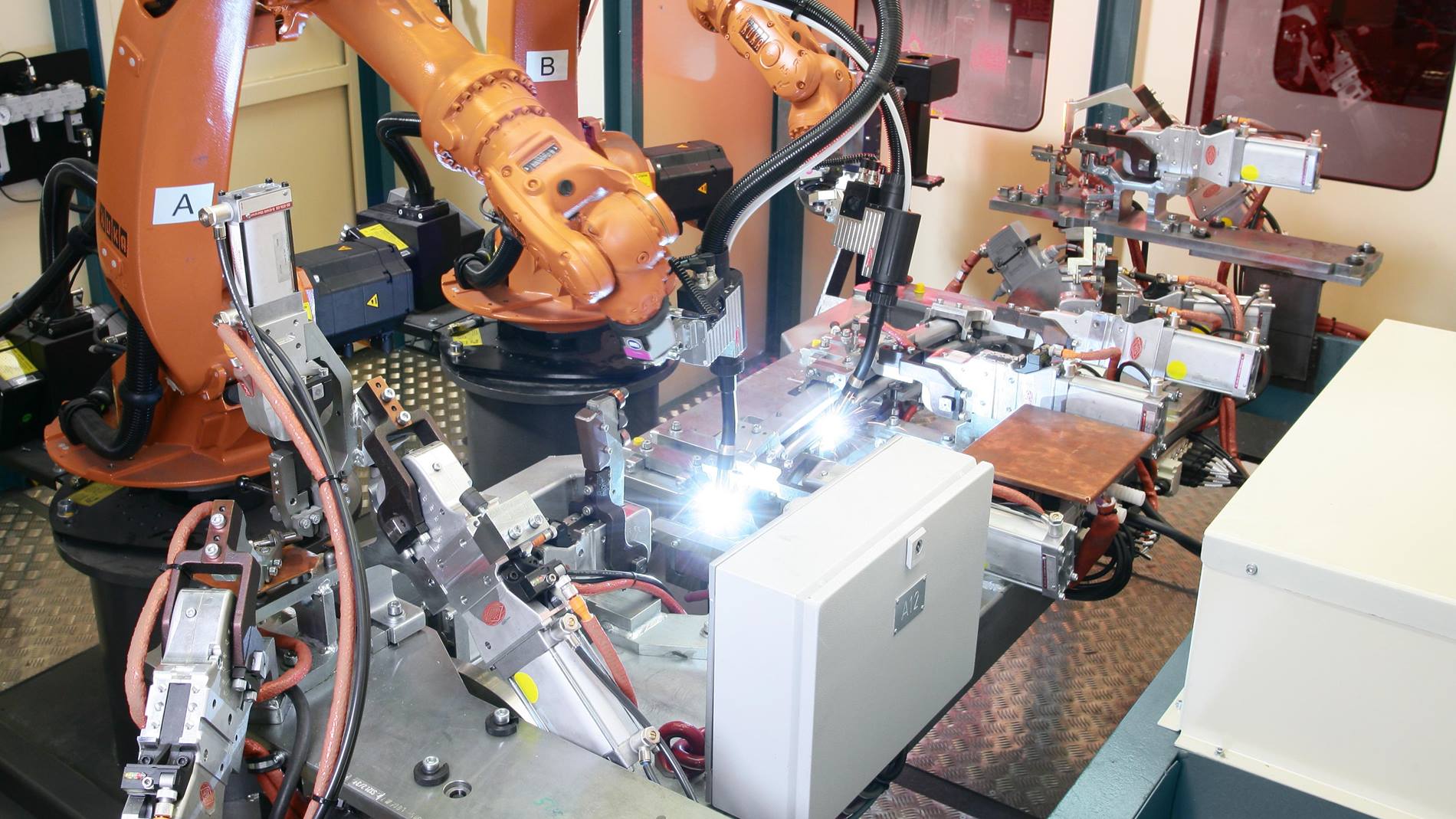
Med programvaran KUKA.RoboTeam kan två KUKA-robotar svetsa samtidigt på en och samma komponent.
Systemkrav för KUKA.RoboTeam
Robotstyrningen KR C4 med tillvalet RoboTeam
KUKA System Software 8.3
En helt konfigurerbar switch (manageable switch) för KLI-anslutning till WorkVisual