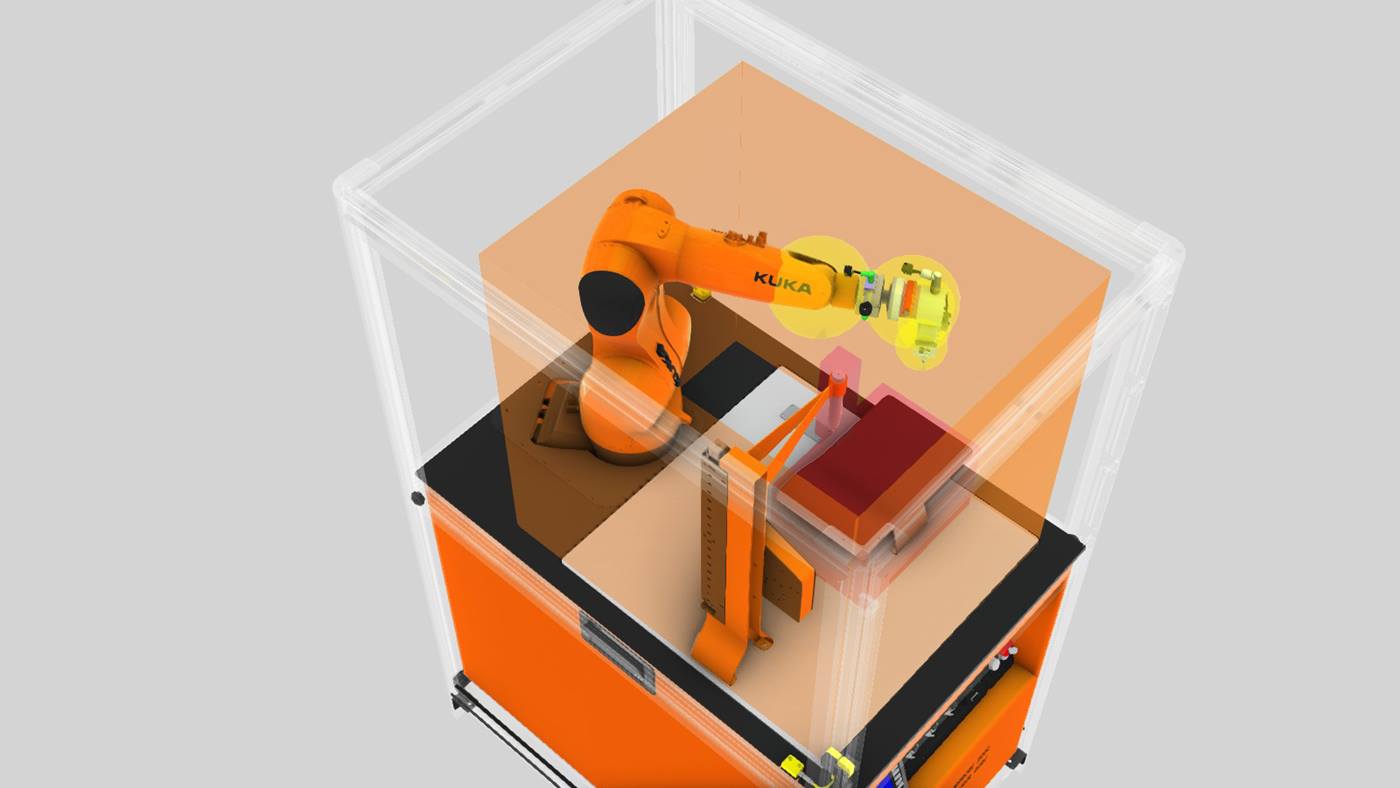
Övervakningsrum med KUKA.SafeOperation
Fokus ligger på säkerheten. Programvaran erbjuder upp till 16 övervakningsrum och ett fast cellområdet för säker minskning av det teoretiska arbetsutrymmet. Hur dessa övervakningsrum definieras avgör robotens beteende.
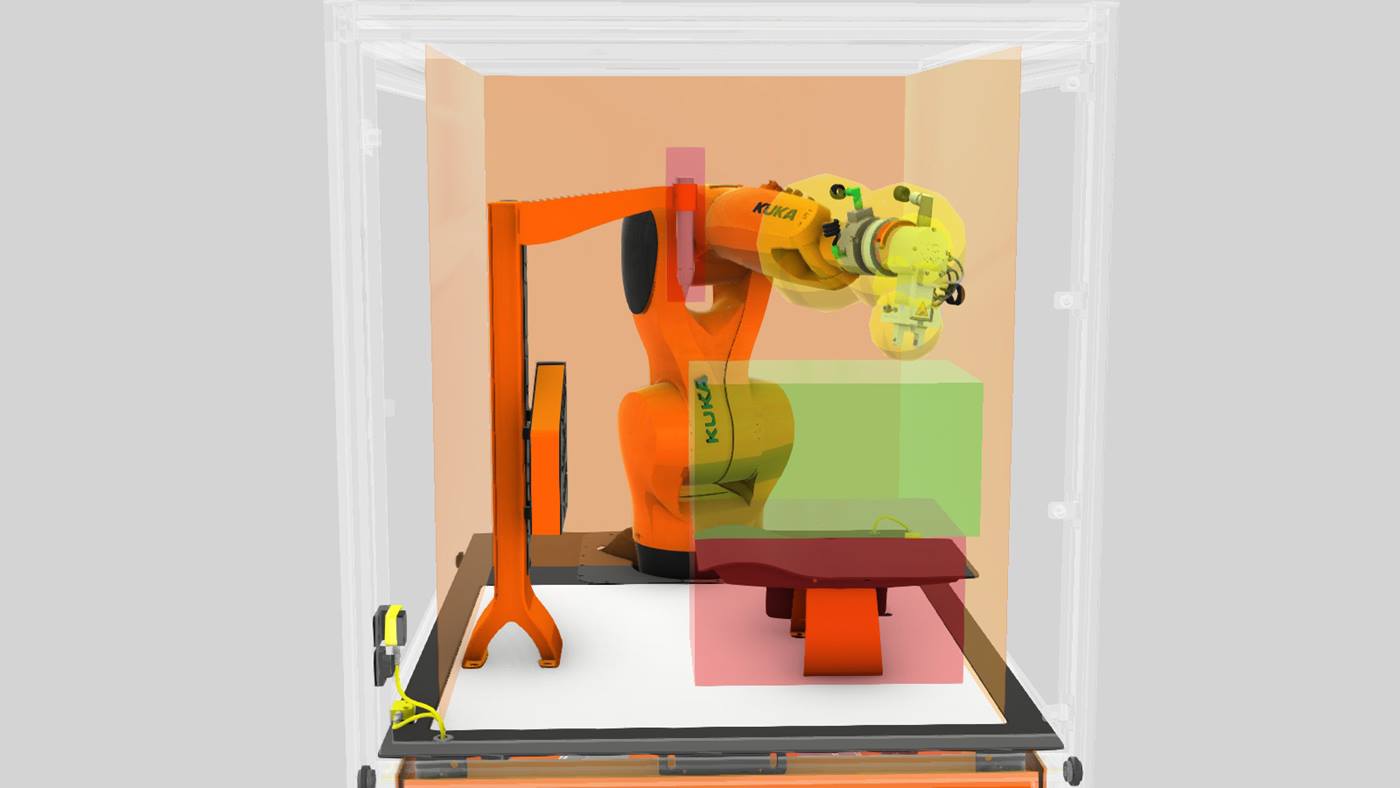
Varje område kan ställas in individuellt. Välj mellan kartesisk och axelspecifik definition. Du kan dessutom skilja mellan följande typer av områden:
- Arbetsutrymme
- Skyddsområde
- Signaleringsskyddsområde (ej stoppande)
- Signaleringsarbetsutrymme (ej stoppande)
- Cellområde (inte omkopplingsbart)