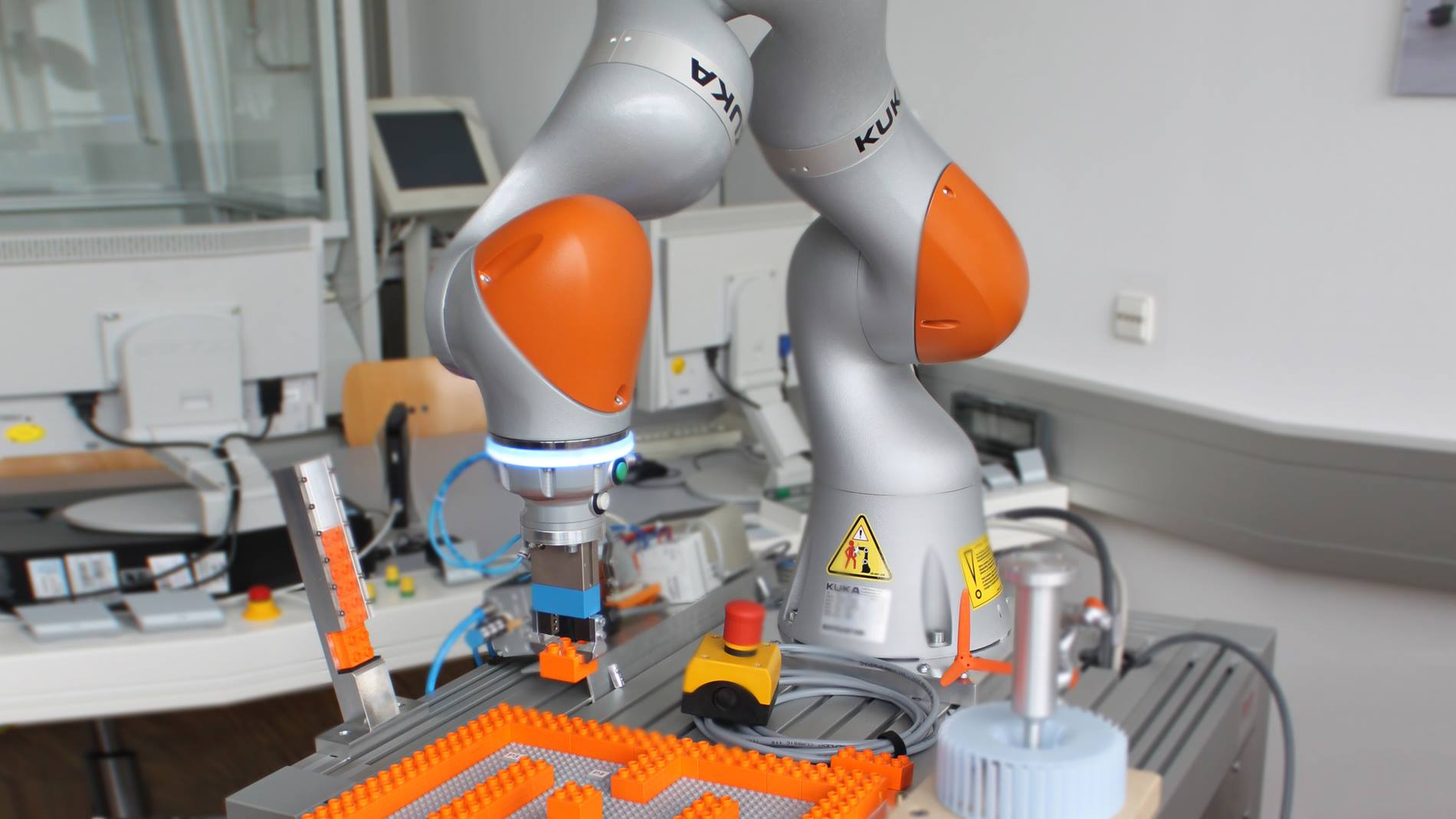
LBR iiwa löst Aufgaben mit Feingefühl
Mit der Faszination für Legosteine und Roboter beginnt wahrscheinlich so manche Ingenieurskarriere bereits im frühen Kindesalter. Unter dem Leiter des Montage- und Robotik-Labors der Hochschule Rosenheim, Prof. Dr. Christian Meierlohr, setzt sich die Beschäftigung damit fort: An der Applikation mit dem LBR iiwa von KUKA stapeln Studenten der Ingenieurswissenschaften Legosteine jedoch nicht mehr selbst. Stattdessen lassen sie dies den feinfühligen, siebenachsigen Leichtbauroboter erledigen. Der LBR iiwa greift die Stücke, stapelt sie und steckt sie mit Gefühl zusammen. So lassen sich auch Labyrinthe aus Legosteinen erstellen, die der sensitive Leichtbauroboter mit seinem Greifaufsatz durchfährt. Die Studierenden nutzen dabei seine Fähigkeit, Hindernisse und Kollisionen sensitiv zu erkennen und zu vermeiden, um den Weg aus dem Labyrinth zu finden. Da der Roboter auf einem speziell angefertigten Laborwagen montiert ist, kann er frei im Raum bewegt und so flexibel in anderen Veranstaltung der Lehre eingesetzt werden.
Handling von Bauteilen mit KUKA Kleinroboter
Der Kleinroboter KR AGILUS sixx ist extrem schnell. Dieser befindet sich in einer Schulungszelle mit einem Durchlichttisch, einer automatischen Werkstückzuführung per Rüttelförderer sowie einem Bildverarbeitungssystem zur Werkstückerkennung. Je nach Fortschritt des Studiums – Bachelor oder Master – können damit verschiedene Aufgaben bewältigt werden. Pick-and-Place ist ein typisches Automatisierungsszenario. Hierbei wird der Roboter genutzt, um Werkstücke zu greifen und zielgenau zu positionieren. Dabei kann auch das Bildverarbeitungssystem verwendet werden, um verschiedene Teile zu erkennen und zu sortieren. Eine weitere Aufgabe sieht vor, den Roboter so zu programmieren, dass er ein Schaumstofflabyrinth durchfahren kann.
Programmierung per Softwaresimulation
Apropos Programmierung: Mit der Simulationssoftware KUKA.Sim Pro können die Studierenden Roboter offline am PC programmieren und mit KUKA.OfficeLite den Ablauf testen. So lernen sie, Bewegungsabläufe etwa für Roboterzellen für Fertigung und Montage zu erstellen. Die offline programmierten Abläufe können nach den simulierten Tests direkt an der realen Maschine überprüft und praxisnah optimiert werden. „Die Simulation ist ein guter erster Schritt für die Planung, was mit einem Roboter gemacht werden kann, dennoch stößt man früher oder später an Grenzen. Die reale Welt verhält sich in manchen Details etwas anders als die simulierte. Daher ist es von hohem Wert, dass wir die Planung am Computer direkt auf die echten Roboter übertragen und anwenden können“, so Prof. Dr. Meierlohr. Die Einbindung der Simulationsarbeitsplätze ermöglicht es zudem, dass die Studierenden in kleinere Gruppen aufgeteilt werden und dadurch an mehreren Stationen arbeiten können. Dies steigert die Lernintensität sowie den Lernerfolg. Und die Studierenden durchlaufen auf diese Weise die typischen Ingenieursaufgaben von Planung bis realer Umsetzung.